0373-5939925
0373-5939925 2851259250@qq.com
2851259250@qq.com

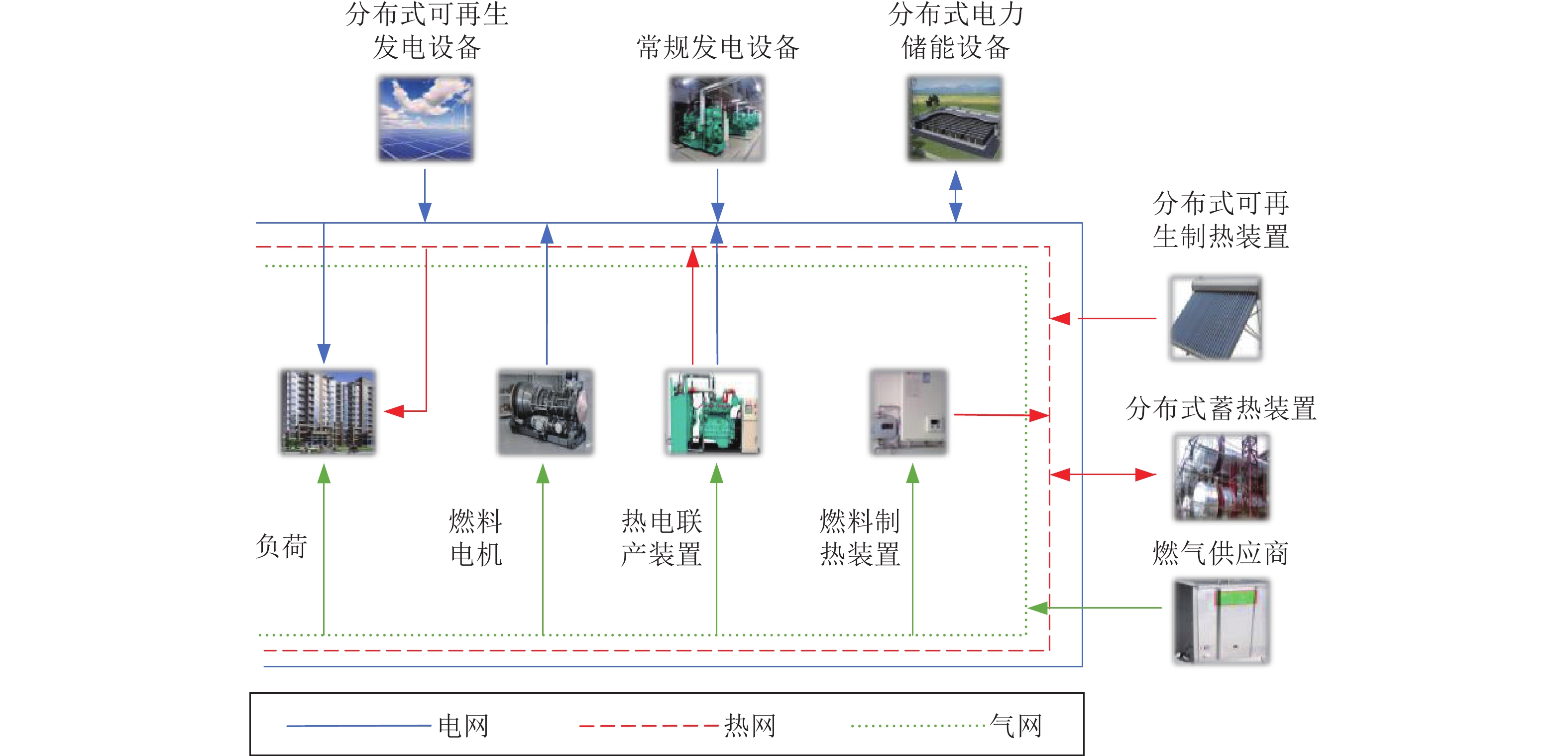
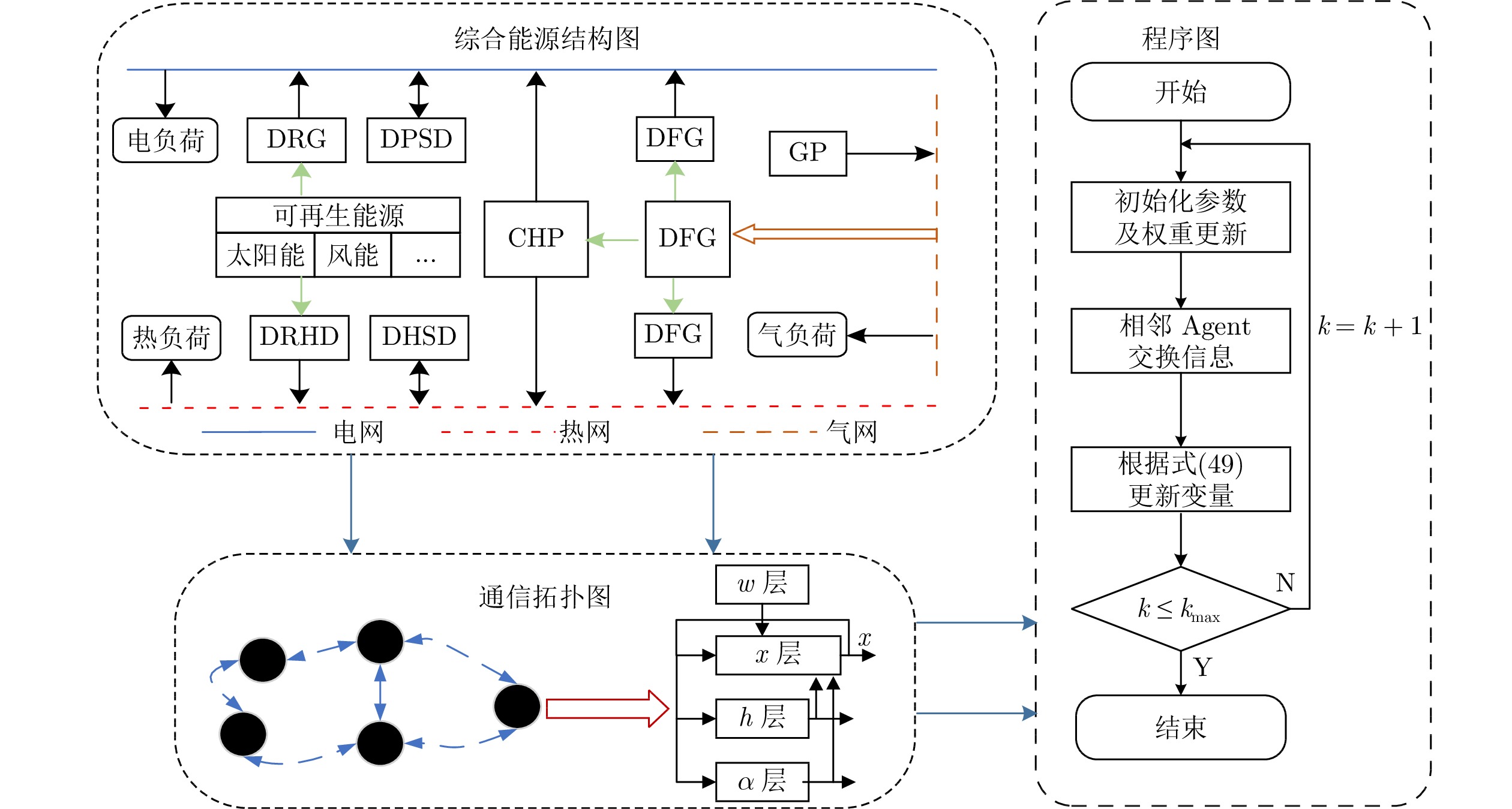
图 1 本文所考虑的综合能源系统结构图
Fig. 1 Architecture of integrated energy system considered in this paper
随着全球能源危机的加剧, 包含太阳能、风能等新能源, 并整合了电、气、热等多元产、用能源形式的综合能源系统, 凭借其节能、环保和灵活等特点受到了世界各国的广泛关注. 近年来, 国内外学者针对有关综合能源系统的各种关键理论与工程技术, 如优化调度[1]、发电预测[2]、协同控制[3]等, 开展了大量的科学研究和理论分析工作并得到了丰硕的研究成果.
与已有电、气、热等单一供能系统一样, 在综合能源系统的运行过程中, 如何实现其优化调度是人们最为关注的问题之一, 即如何在满足各机组单元运行约束的前提下, 通过优化分配负荷需求并合理安排产能计划实现系统运行总成本(经济成本、环境成本等)最低[4]. 近年来, 针对综合能源系统的优化调度问题, 国内外科研学者提出了许多成熟的解决办法, 其总体上可以分为两类, 即集中式方法和分布式方法. 其中, 集中式方法主要包括解析式算法和启发式算法, 如迭代法、牛顿法和遗传算法等. 1)解析式算法, 如: 文献[5]提出了一种混合整数优化方法解决具有多不确定性的综合能源系统调度问题; 2)启发式算法, 如: 文献[6]提出了一种基于直接搜索方法(Direct search method, DSM)的解决综合能源系统经济调度问题的新方法, 该算法可以处理发电机的非线性特性所带来的问题. 集中式算法在获得最优解方面具有一定优势, 但存在单点故障敏感、通信负担较大和隐私泄露等缺点. 较之于集中式方法, 分布式方法可以利用稀疏的通信网络结构实现网络内各组件的分散式协作, 可有效提高系统的鲁棒性和灵活性, 并兼具保护隐私等优点. 因此, 近年来基于分布式方法研究综合能源系统的优化调度问题, 已经成为国内外学术界的研究热点. 文献[7]提出了一种智能能源枢纽的分布式综合需求响应算法, 但它需要一个中央价格协调器和一个集中的通信网络来更新当地的能源需求信息, 因而认为该算法是一种非完全分布式的方法; 文献[8]针对多能源系统的优化调度问题提出了一种基于一致性的分布式方法; 文献[9]提出了一种针对多能源需求的两层分布式优化策略, 以优化生产者的利润和用户的舒适度. 然而, 文献[8]和文献[9]仅考虑了全局等式和局部不等式约束, 没有讨论电力线路传输约束等耦合约束; 文献[10]提出了一种综合能源系统经济运行的分布式优化方法, 以适应间歇性可再生能源发电. 但是它无法解决全局耦合的不可分离不等式约束, 所以没有考虑电网传输损耗等因素的影响. 值得指出的是, 已有的研究成果大部分都是只考虑系统运行经济性的综合能源系统单目标分布式优化调度方法, 而在兼顾系统经济性与环境友好性的多目标分布式优化调度策略的研究尚较为不足. 近期, 在多目标分布式优化理论研究方面, 文献[11]中提出了一种基于次梯度的多目标分布式优化算法, 并讨论了权重向量的选择与帕累托前沿(Pareto front)近似误差之间的关系. 但是基于次梯度的方法需要减小步长才能得到精确的解, 这可能会限制算法的性能. 文献[12]和文献[13]分别提出了基于迭代增广拉格朗日协调技术和扩散策略的多目标分布式优化算法, 但是其算法处理的约束为等式约束和线性的不等式约束, 无法处理更具一般性的约束. 针对一类带有一般性约束的非线性优化问题, 文献[14]提出了一种基于切换拓扑的多目标分布式神经动态优化方法. 该方法可以有效处理更为一般的约束, 且较之于现有多目标分布式优化方法具有可并行计算、收敛速度快和易于硬件实现的优点. 但是该算法在权向量的选取上采用了人为选定方式, 因而无法覆盖整个权向量空间, 且要求目标问题为凸优化问题. 然而, 综合能源系统的多目标优化调度问题具有耦合性强和约束一般性强等特点, 并且在考虑能量传输损耗特性等因素时, 会造成目标问题具有非凸特性, 因此上述所提算法不能直接应用于求解此类问题.
针对一类综合能源系统的优化调度问题, 本文提出了一种基于分布式神经动态优化的多目标优化调度方法. 首先, 建立了此类综合能源系统兼顾系统经济性与环境友好性的多目标优化调度模型, 该模型除考虑了系统能量平衡和设备特性约束等一般性约束外, 还同时考虑了系统能量传输损耗与网络传输约束, 因而不同于大部分已有分布式优化方法, 本文需要解决的是一类非凸的多目标优化问题; 其次, 针对此类问题, 本文提出了一种基于动态权重的分布式神经动态优化算法, 该算法不仅可以有效处理文献[10]和文献[15]中无法解决的全局耦合不可分离不等式约束, 进而解决能量传输损耗因素带来的非凸问题, 而且可在动态权重系统的指导下生成不断变化的权向量, 使得智能体输出轨迹可涵盖整个帕累托前沿, 进而有效解决此类非凸多目标优化问题; 此外, 该算法仅要求每个智能体与自己邻居节点交互部分信息来计算本地最优解, 具有较高的灵活性和隐私性等优势. 最后, 本文搭建了15节点的综合能源MATLAB仿真测试系统, 通过2个仿真算例, 验证了算法的正确性和有效性.
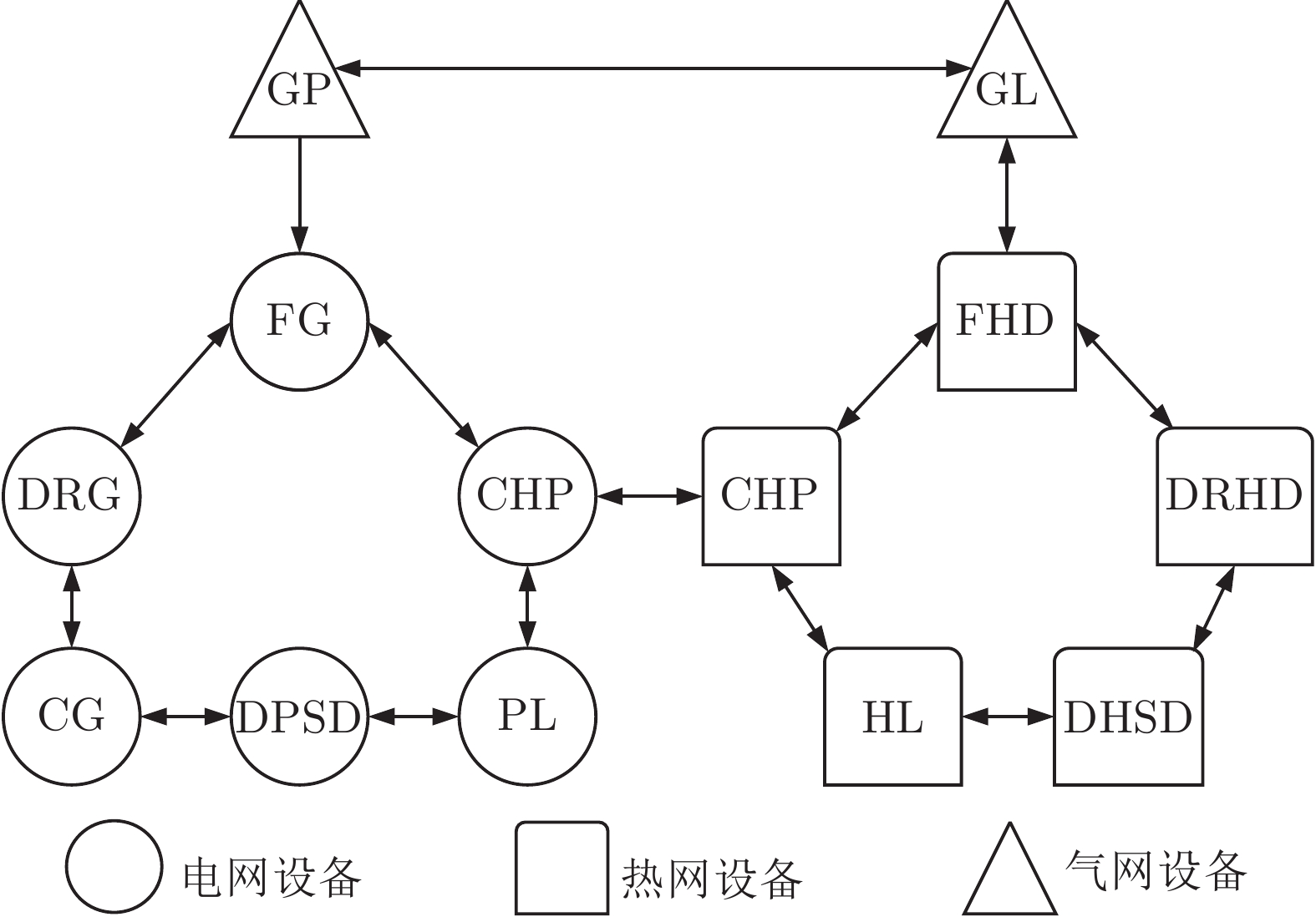
本文考虑的综合能源系统如图1所示, 其主要设备包括: 1)仅发电装置, 包括常规发电设备(Conventional generator, CG)、分布式可再生发电设备(Distributed renewable generator, DRG)、燃料电机(Fuel generator, FG)和分布式电力储能设备(Distributed power storage device, DPSD); 2)仅发热装置, 包括分布式可再生制热装置(Distributed renewable heating device, DRHD)、燃料制热装置(Fuel heating device, FHD)和分布式蓄热装置(Distributed heat storage device, DHSD); 3)热电联产装置(Combined heat and power device, CHP); 4)燃气供应商(Gas producer, GP). 同时, 负荷(Energy load, EL)可分为3类, 即电负荷(Power load, PL)、热负荷(Heat load, HL)和气负荷(Gas load, GL), 其中每类负荷都包含常规负荷和柔性负荷. 此类综合能源系统可应用于现代工业园区和智能楼宇等场所.
综合能源系统多目标优化调度旨在满足能量平衡约束和各机组单元运行约束的前提下, 实现系统兼顾经济性与环境友好性的综合优化. 本文以图1所示的综合能源系统为研究对象, 为实现其综合成本最优, 以下给出了此多目标优化调度问题的数学模型.
考虑经济性目标是使系统的运行总成本最低, 因此本文的经济性目标函数具体描述为
| Ffuel=∑i∈ϑCGC(PCGi,t)+∑i∈ϑDRGC(PRGi,t)+∑i∈ϑDRHDC(HRHi,t)+∑i∈ϑFGC(PFGi,t)+∑i∈ϑFHDC(HFHi,t)+∑i∈ϑGPC(gGPi,t)+∑i∈ϑCHPC(PCHPi,t,HCHPi,t)+∑i∈ϑDPSDC(PPSi,t)+∑i∈ϑDHSDC(HHSi,t)−∑i∈ϑPLC(PPLi,t)−∑i∈ϑHLC(HHLi,t)−∑i∈ϑGLC(gGLi,t) | (1) |
式中,
定义每个常规发电设备(CG)的成本函数, 如式(2)所示.
| C(PCGi,t)=12αCGi(PCGi,t)2+βCGiPCGi,t+γCGi | (2) |
式中,
对于分布式可再生发电设备(DRG)来说, 主要能源是燃料成本为零的太阳能和风能. 由于间歇性和随机性的特点, 可再生发电设备一般被视为不可调度的单元. 为了在优化调度中考虑这些问题, 本文参考文献[16]中对可再生发电设备的成本函数建模机理, 将DRG的成本函数建模为
| C(PRGi,t)=bRGiPRGi,t+εRGiexp(γRGiPRG,maxi,t−PRGi,tPRG,maxi,t−PRG,mini,t) | (3) |
式中,
定义每个燃料电机(FG)的成本函数, 如式(4)所示.
| C(PFGi,t)=aFGi(PFGi,t)2+bFGiPFGi,t+cFGi+εFGiexp(ηFGiPFGi,t) | (4) |
式中,
| gasFGi,t=θ(PFGi,tηFGi) | (5) |
式中,
FG模型也可应用于FHD. 并设
| gasFHi,t=θ(HFHi,tηFHi) | (6) |
式中,
将燃气供应商(GP)的成本函数建模为
| C(gGPi,t)=aGPi(gGPi,t)3+bGPi(gGPi,t)2+dGPigGPi,t+cGPi | (7) |
式中,
将热电联产机组的成本函数建模为以下凸函数:
| C(PCHPi,t,HCHPi,t)=aCHPi(PCHPi,t)2+bCHPiPCHPi,t+αCHPi(HCHPi,t)2+βCHPiHCHPi,t+σCHPiPCHPi,tHCHPi,t+cCHPi | (8) |
式中,
| gasCHPi,t=θ(HCHPi,t+PCHPi,t)ηCHPi | (9) |
式中,
电力储能设备不能同时充放电. 为了方便起见, 将
| C(PPSi,t)=aPSi(PPSi,t+bPSi)2 | (10) |
式中,
将综合能源系统中的负荷分为3类, 分别是电负荷、热负荷和气负荷; 其中每一类负荷都包含常规负荷(系统必须承担的负荷, 不参与调度)和柔性负荷(系统可以灵活调节的, 参与调度). 根据文献[17]将三种柔性负荷的成本函数建模为
| C(PPLi,t)={−aPLi(PPLi,t)2+bPLiPPLi,t,PPLi,t≤bPLi2aPLi(bPLi)24aPLi,PPLi,t>bPLi2aPLi | (11) |
式中,
环境友好性目标旨在实现系统污染气体总排放量最低, 通常以CO2, SOx和NOx作为主要污染气体, 即综合最小化系统含硫、氮、碳污染气体排放总量. 本文的排放成本模型采用多项式和指数项的组合的形式, 具体描述如下[18]:
| Femission=Ec+Es | (12) |
其中,
| Ec=Ec(PCGi,t)+Ec(PFGi,t)+Ec(PCHPi,t)+Ec(HFHi,t)+Ec(gGPi,t)=τCGiPCGi,t+τFGiPFGi,t+τCHPiPCHPi,t+τFHiHFHi,t+τGPigGPi,t | (13) |
| Es=Es(PCGi,t)+Es(PFGi,t)+Es(PCHPi,t)+Es(HFHi,t)+Es(gGPi,t)=ωCGi+μCGiPCGi,t+κCGi(PCGi,t)2+ζCGie(πCGiPCGi,t)+ωFGi+μFGiPFGi,t+κFGi(PFGi,t)2+ζFGie(πFGiPFGi,t)+(ωCHPi+μCHPi)PCHPi,t+(ωFHi+μFHi)HFHi,t+(ωGPi+μGPi)gGPi,t | (14) |
式中,
由于DRG和DRHD为分布式可再生发电和制热设备, 即对环境的代价成本为0, 所以在环境目标中不考虑它们. 此外, 分布式储能和蓄热装置对环境造成的污染也为0. 为了方便起见, 本文考虑的柔性负荷为居民负荷, 不考虑其使用对环境的影响.
在综合能源系统多目标优化调度的目标函数中, 运行成本和排放成本性质上是相互矛盾的, 两者都必须同时考虑. 因此, 必须得到最优排放调度与最优经济成本调度之间的权衡关系. 当同时考虑最优排放和最优经济运行成本时, 多目标优化问题的目标函数可以表示为[18]
| min[Ffuel,Femission] | (15) |
式中,
系统运行时需满足电功率平衡等式约束、热功率平衡等式约束和气功率平衡等式约束, 具体描述为
| ∑i∈ϑCGPCGi,t+∑i∈ϑDRGPRGi,t+∑i∈ϑFGPFGi,t+∑i∈ϑCHPPCHPi,t+ ∑i∈ϑDPSDPPSi,t−∑i∈ϑPLPPLi,t−Ploss=Pload | (16) |
| ∑i∈ϑDRHDHRHi,t+∑i∈ϑFHDHFHi,t+∑i∈ϑCHPHCHPi,t+ ∑i∈ϑDHSDHHSi,t−∑i∈ϑHLHHLi,t−Hloss=Hload | (17) |
| ∑i∈ϑGPgGPi,t−∑i∈ϑFGgasFGi,t−∑i∈ϑFHgasFHi,t− ∑i∈ϑCHPgasCHPi,t−∑i∈ϑGLgGLi,t=gload | (18) |
式中,
| Ploss=NP∑i=1NP∑m=1Pi,tBimPm,t+2NP∑i=1Nc∑j=1Pi,tBijPj,t+Nc∑j=1Nc∑n=1Pj,tBjnPn,t | (19) |
式中,
| Hloss=n∑g=12πts,f−ta,gRhlg | (20) |
式中,
系统运行时常规发电设备需满足出力上下限不等式约束, 具体描述为
| Pcg,mini,t≤PCGi,t≤Pcg,maxi,t | (21) |
| −PCG,rampi,t≤PCGi,t−PCGi,t−1≤PCG,rampi,t | (22) |
式中,
系统运行时分布式可再生发电设备需满足出力上下限不等式约束, 具体描述为
| PRG,mini,t≤PRGi,t≤PRG,maxi,t | (23) |
式中,
系统运行时燃料电机需满足出力上下限不等式约束, 具体描述为
| PFG,mini,t≤PFGi,t≤PFG,maxi,t | (24) |
| −PFG,rampi,t≤PFGi,t−PFGi,t−1≤PFG,rampi,t | (25) |
式中,
系统运行时燃气供应商需满足出力上下限不等式约束, 具体描述为
| gGP,mini,t≤gGPi,t≤gGP,maxi,t | (26) |
式中,
系统运行时CHP机组需满足热–电可运行域约束, 具体描述为
| eCHPi,mPCHPi,t+fCHPi,mHCHPi,t+zCHPi,m≤0,m=1,2,3,4 | (27) |
| −PCHP,rampi,t≤PCHPi,t−PCHPi,t−1≤PCHP,rampi,t | (28) |
式中,
系统运行时电力储能设备需满足充放电功率约束和存储能量约束, 具体描述为
| −PCH,maxi,t≤PPSi,t≤PDS,maxi,t | (29) |
| SPS,mini,t≤SPSi,t≤SPS,maxi,t | (30) |
| SPSi,t=SPSi,t−1−PPSi,tΔt | (31) |
式中,
系统运行时柔性负荷需满足功率约束, 具体描述为
| 0≤PPLi,t≤PPL,maxi,t−Pload | (32) |
式中,
网络拓扑支路约束是影响综合能源系统优化结果的重要因素[20], 本文对电网、热网和气网的网络拓扑支路约束的具体考量描述如下.
系统运行时电网传输线路需满足支路约束, 具体描述为[21]
| Pmine≤Pe≤Pmaxe | (33) |
式中,
热网输送管道在系统运行时也需要满足支路约束, 具体描述为[19]
| tmins,f≤ts,f≤tmaxs,f | (34) |
| mming≤mg≤mmaxg | (35) |
| qf=cmg(ts,f−tr,f) | (36) |
式中,
气网输送管道流量由管道的特性(如长度、直径、工作温度和关联节点之间的压差)决定. 该流量可以建模为[20]
| gij=sgn(πi,πj)Cij√|π2i−π2j| | (37) |
| sgn(πi,πj)={1,πi≥πj−1,πi<πj | (38) |
| πmini≤πi≤πmaxi | (39) |
式中,
注 1. 本文提出了考虑能源的产生、转换和消费过程中电、热、气三者之间的强耦合关系的综合能源系统多目标优化调度模型. 然而, 现有的文献大多是关于电热系统, 涉及气网的文献较少. 相较之于电热系统, 考虑气网后, 由于燃气可通过FG、CHP和FHD等装置转化成电能和热能, 需要在目标模型中增加相应设备的经济成本和环境成本函数, 此外还需要进一步引入气网平衡方程和气网输送管道流量约束, 因此系统模型的复杂度和耦合性均明显增强. 另外, 在设计算法时, 也需对应引入新增相关设备(FG和FHD)的成本决策变量、对应气网平衡方程的全局耦合等式约束(式(18))和对应设备出力约束、天然气管道压力约束等若干不等式约束. 因而, 要求算法具有较强的解耦能力和计算性能. 为了便于成本函数模型的建立, 现有文献中成本函数大都考虑二次函数形式, 导致了电热气综合能源系统模型的不准确性. 因此, 我们考虑在目标函数时加入了非线性项, 建立了一个相对准确的综合能源系统模型. 同时考虑了系统的需求响应策略, 使系统的运行更加灵活、经济, 更接近于实际的系统运行.
用
假设 1. 图
定义节点
将综合能源系统多目标优化调度问题抽象成一个多目标优化问题(Multi-objective optimization problem, MOOP), 其描述为
| minF(x)=[F1(x),F2(x)]Ts.t.h(x)≤0,Ax=b | (40) |
式中,
引理1[22-23]. 如果所有的目标函数是凸函数, 并且可行域
与单一目标的优化问题不同, 由于目标函数之间的矛盾, 多目标优化往往不可能得到一个能同时最小化所有目标的单一解. 因此, MOOP式(40)的解被描述为帕累托最优, 它反映了所有目标函数之间的权衡. 帕累托的最优性定义如下.
定义1. 如果不存在
帕累托最优解集
用
本文采用线性加权和法将多目标优化问题转化为单目标优化问题, 即每个目标乘以一个加权因子, 将MOOP式(40)转换为
| minw1F1(x)+w2F2(x)s.t.h(x)≤0,Ax=b | (41) |
式中,
引理2[24]. 对于任意MOOP式(40), 假设其是凸优化问题, 那么
综合能源系统多目标优化调度问题的2个目标函数
定理1. 假设所有发电设备的功率下界和所有电负荷的功率上界都满足:
| ∑i∈ϑCGPCG,mini,t+∑i∈ϑDRGPRG,mini,t+∑i∈ϑFGPFG,mini,t+∑i∈ϑCHPPchp,mini,t+∑i∈ϑDPSDPPS,mini,t−Pminloss≤∑i∈ϑPLPPL,maxi,t+Pload |
| Pminloss=NP∑i=1NP∑m=1Pmini,tBimPminm,t+2NP∑i=1Nc∑j=1Pmini,tBijPminj,t+Nc∑j=1Nc∑n=1Pminj,tBjnPminn,t | (42) |
将等式约束(16)转化为不等式约束,从而得到新的凸优化问题(43a)为
| minw1Ffuel+w2Femission(43a)s.t.∑i∈ϑCGPCGi,t+∑i∈ϑDRGPRGi,t+∑i∈ϑFGPFGi,t+∑i∈ϑCHPPCHPi,t+∑i∈ϑDPSDPPSi,t−∑i∈ϑPLPPLi,t−Ploss≥Ploadm≤Pi,t≤M,i∈ϑ(17),(18) |
式中, 对于不同的设备,
本文参考文献[17]通过分析凸优化问题(43a)的KKT (Karush-Kuhn-Tucker)条件, 从而证明在条件(42)下原非凸优化问题与凸优化问题(43a)的等价性. 首先, 假设问题(43a)中的约束(43b)取“>”, 通过分析KKT条件, 得到了与条件(42)相反的结果, 从而证明问题(43a)在约束(43b)中取“=”时才能得到最优解, 即原非凸优化问题和凸优化问题(43a)具有相同的最优解. 具体证明参见附录A.
MOOP的神经动力学方法由神经动力学系统和动态权值更新两部分组成.
为了建立求解多目标优化问题的神经网络模型, 我们将神经网络模型应用于具有单一目标函数的转化问题(43a). 接下来提出神经网络模型.
当给定权重向量时, 通过加权法, 将上述问题多目标优化问题转化为单目标优化问题(43a). 我们将上述优化问题抽象成一般的数学形式, 如下所示, 考虑用一个具有m个Agent (其中一个Agent代表一个递归神经网络(Recurrent neural network, RNN)的分布式神经动力网络求解该优化问题
| minf(x)=m∑i=1fi(x)x=(PCG,PRG,⋯,gGL,⋯,ts,f,mg)s.t.Aix=bihi(x)≤0,i∈{1,2,⋯,m} | (44) |
式中,
假设2. 在
假设3 (Slater condition). 对于该优化问题, 存在
基于RNN的神经网络的分布式算法是将每个RNN设置成一个Agent, 即第
设问题(44)的解是
设
引理3[25]. 当假设1成立时, 优化问题(44)等价于下列优化问题:
| minf(x)=m∑i=1fi(xi)s.t.Ax=bh(x)≤0Lx=0 | (45) |
式中,
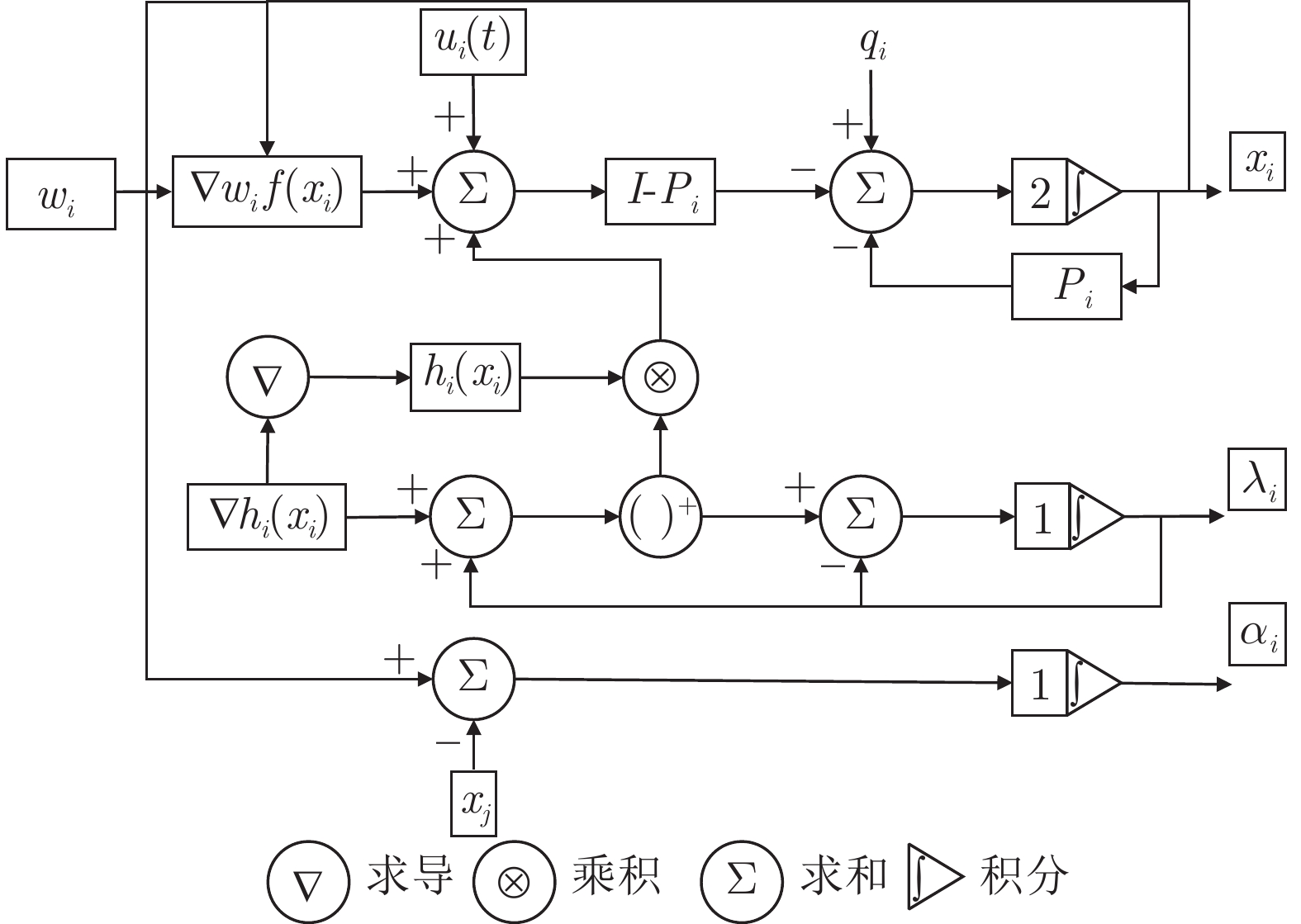
为了解决上述问题, 在文献[25]的启发下, 提出一种新的分布式神经动态优化算法, 具体为
| dxdt=2[−Px+q−(I−P)(∂f(x)+(∂h(x))T(λ+h(x))++u)]dλdt=−λ+(λ+h(x))+dαdt=Lx | (46) |
式中,
注2. 文献[25]提出了一种基于递归神经网络的分布式神经动态优化算法. 该算法与本文所提算法的区别在于: 首先, 文献[25]是针对单目标凸优化问题而设计的, 而本文所讨论的是多目标优化问题, 且由于进一步考虑了能量传输损耗, 导致目标问题带有非凸特性, 因而无法直接套用文献[25]的算法和结论; 其次, 文献[25]算法中含有“
引理4[26]. 假设
| u=kPLx+kI∫t0Lx(s)ds | (47) |
| ui(t)=kPm∑j=1aij(xi(t)−xj(t))+kI∫t0m∑j=1aij(xi(s)−xj(s))ds | (48) |
式中,
假设4. 每个
在多智能体网络中, 每个Agent在局部约束的限制下, 被分配用来处理局部目标函数的最小值. 每个Agent根据图
| xi,k+1=xi,k+2[−Pixi,k+qi−(I−Pi)(∂fi(xi,k)+(∂hi(xi,k))T(λi,k+hi(xi,k))++kPm∑j=1,j≠iaij(xi,k−xj,k)+kIαi,k)]λi,k+1=(λi,k+hi(xi,k))+αi,k+1=αi,k+m∑j=1,j≠iaij(xi,k−xj,k) | (49) |
式中,
定理2. 在假设1 ~ 4下,
| {0=Px∗−q+(I−P)(∂f(x∗)+(∂h(x∗))Tλ∗+kIα∗)λ∗=(λ∗+h(x∗))+Lx∗=0 | (50) |
证明. 在假设2下, 优化问题(45)是凸优化问题. 根据KKT条件,
| 0=∂f(x∗)+ATμ∗+(∂h(x∗))Tλ∗+Lβ∗ | (51) |
| Ax∗=b | (52) |
| h(x∗)≤0,λ∗≥0,hT(x∗)λ∗=0 | (53) |
| Lx∗=0 | (54) |
令
| (m−1)n≤rank([Lα∗])≤mn−rank(1m⊗I)=(m−1)n | (55) |
所以
将式(51)两侧同时乘以
| μ∗=−(AAT)−1A(∂f(x∗)+(∂h(x∗))Tλ∗+kIα∗) | (56) |
再将式(56)代回式(51), 可得:
| 0=(I−P)(∂f(x∗)+(∂h(x∗))Tλ∗+kIα∗) | (57) |
根据引理4可得:
| 0=Px∗−q+(I−P)(∂f(x∗)+(h(x∗))Tλ∗+kIα∗) | (58) |
此外, 式(53)中
| λ∗=(λ∗+h(x∗))+ | (59) |
在假设1 ~ 4下,
接下来证明提出的RNN可以收敛到平衡点
注3. 由式(43a)的形式可知, 其为一类全局不可分离不等式约束, 且为凸约束. 由系统信息拓扑图可知, 假如CG智能体和FG智能体并不相连, 即不可相互传递信息, 则导致CG智能体或者FG智能体无法同时获取
图3给出了所提出的分布式方法的实现图. 可以看到, 当且仅当
为了证明所提出算法的收敛性, 提出了一种等价的算法如下:
| xk+1=xk+2[−Pxk+q−(I−P)(∂f(xk)+(∂h(xk))T(λk+h(xk))++kPLxk+kILβk)]λk+1=(λk+h(xk))+βk+1=βk+xk | (60) |
根据之前的讨论, 在假设4的前提下, 存在
定义2 (输出一致性). 式(49)中的RNN神经动态网络在任何初始条件下, 都能达到输出一致性. 即
| limt→∞‖xi(t)−xj(t)‖=0,∀i,j∈{1,2,⋯,m} | (61) |
式中,
假设5.
前面已经谈论过在假设1 ~ 4的前提下, 每个Agent达到共识的值为优化问题的最优解. 接下来基于Lyapunov函数来讨论RNN网络的稳定性.
定理3. 在假设1 ~ 5下, 对于任意给定的初始点, 输出向量
具体证明参见附录B.
用
定理4. 当假设2成立时, 对于任意
证明. 因为
可以看出, 所有求解问题(41)的神经动力模型都将
为了获得帕累托前沿, 权重因子应该系统地更新. 现有文献多侧重于设计权值的离散时间更新规则, 获得一组近似帕累托前沿的帕累托最优解. 但是值得注意的是, 权重的选择对生成解帕累托前沿中的分布有密切的影响. 为了避免权值选取的困难, 本文设计了一个连续时间动态系统. 注意, 神经动力系统可以实现实时收敛. 现在, 考虑一个极限情况, 权重是连续变化的, 但速度相对较小. 在此基础上, 建立了具有两个时间尺度的连续神经网络模型.
采用下列动态权重:
| ˙w(t)=v | (62) |
式中,
为简洁起见, 定义
| ε˙s=ψ(s,w) | (63) |
| ˙w(t)=v | (64) |
式中,
| 0=ψ(s,w) | (65) |
式(65)描述了帕累托最优解
如前所述, 连续时间模型较之于离散时间模型, 可以提供更为相对完整的帕累托前沿信息.
案例1. 6节点电力系统、5节点区域供热系统和4节点天然气系统的综合能源系统.
本节将提出的分布式神经动态优化算法用于求解电热气耦合系统的多目标优化调度问题, 验证其有效性.
图4和图5分别给出了电热气系统的通信拓扑和物理拓扑. 设备成本参数、约束及电网传输损耗系数矩阵
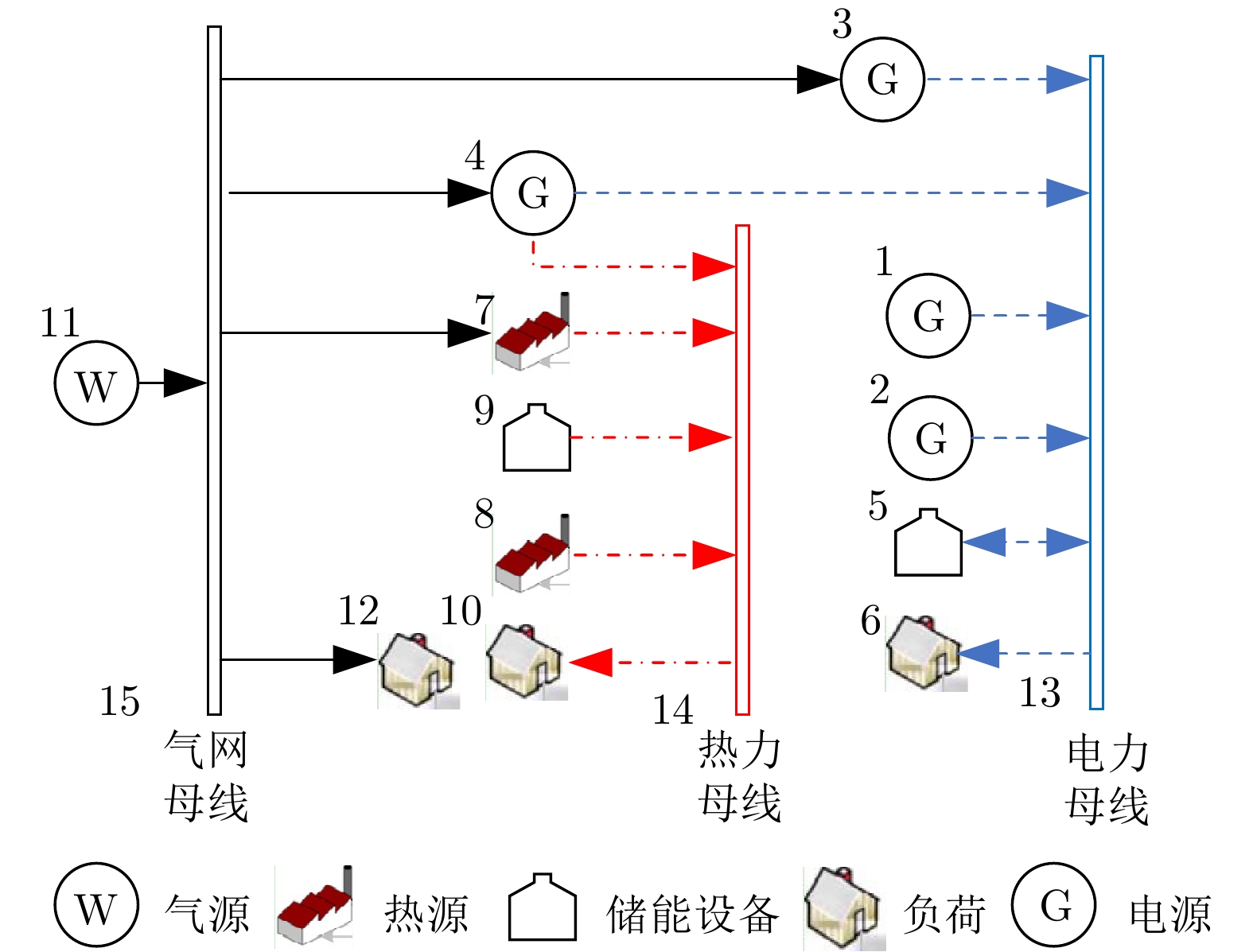
图5中, 节点1 ~ 12分别对应系统设备CG、DRG、FG、CHP、DPSD、PL、FHD、DRHD、DHSD、HL、GP和GL. 虚线13表示电力网络, 点划线14表示热力网络, 实线15表示天然气网络.
系统必须承担的常规负荷: 电力负荷、热负荷和天然气负荷分别是[100 100 1] (p.u.).
| w0=[1,0]T | (66) |
| wk=wk−1+0.05[−1,1]T,k=1,2,⋯,20 | (67) |
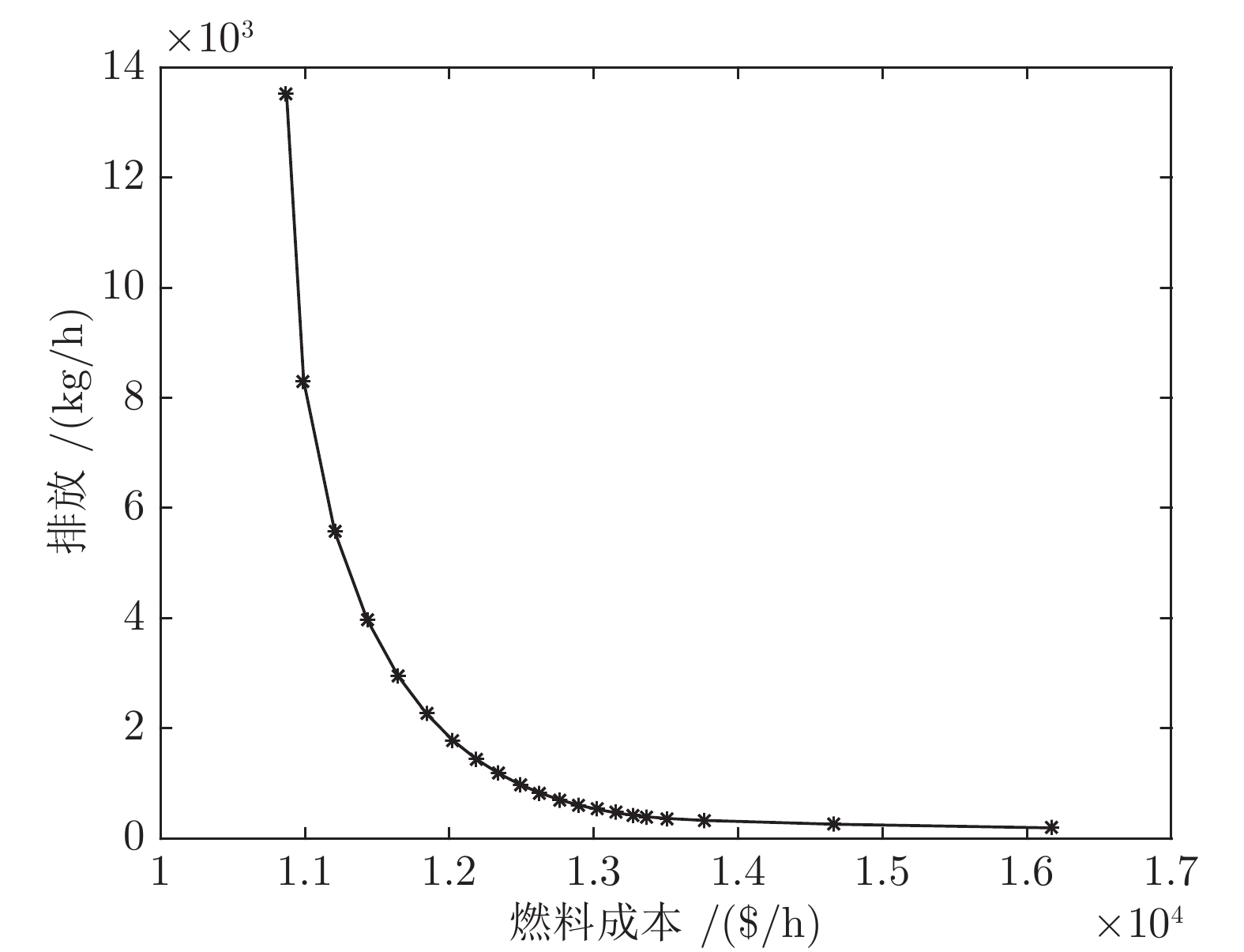
在图6中, 得到的帕累托最优解用星号表示. 可以看出, 所有的帕累托最优解都位于实线上, 即实线非常接近帕累托前沿.
案例2. 综合能源系统多目标优化调度.
不失一般性, 设置权重因子
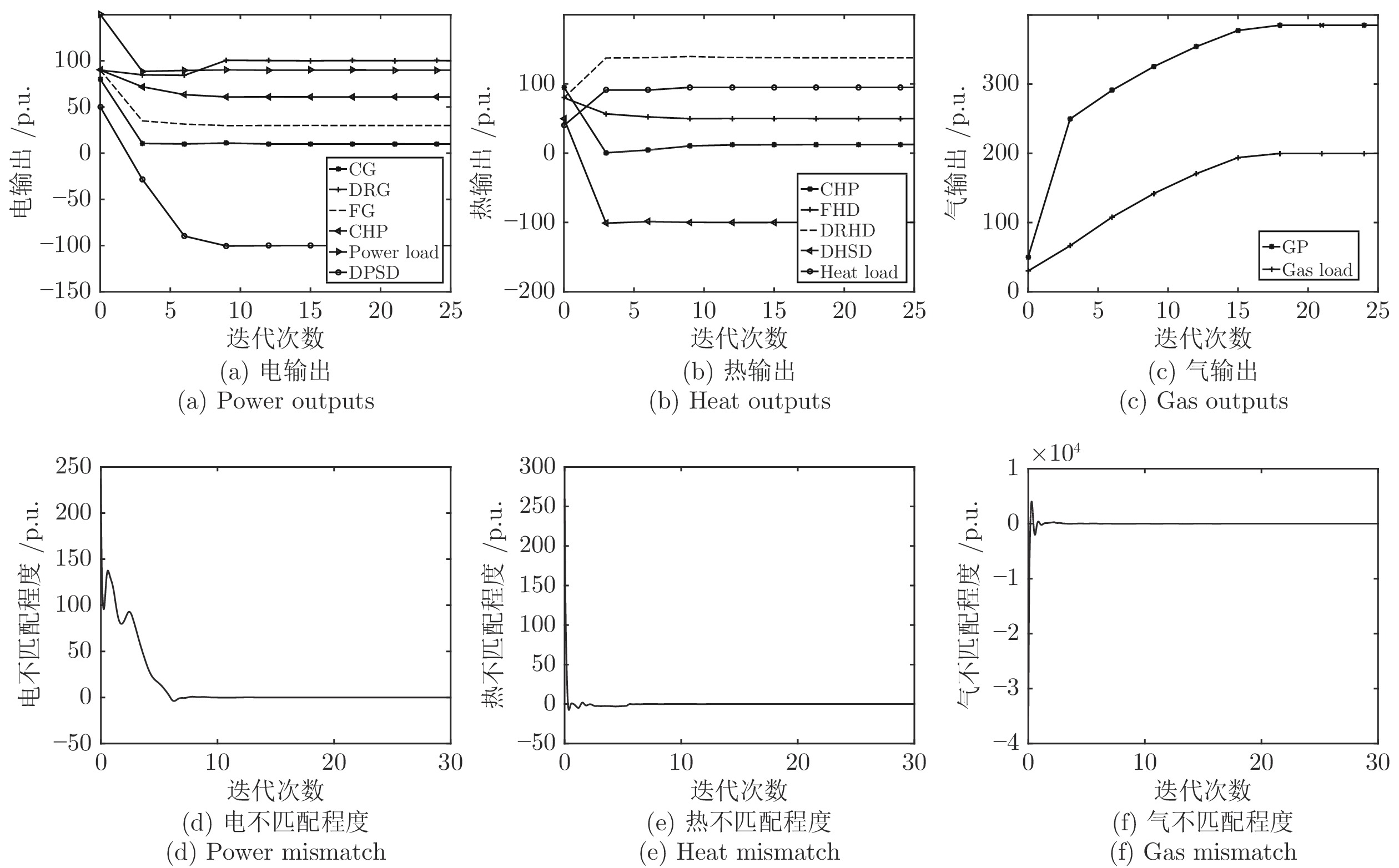
1)收敛性评价
为了方便, 采用案例1的综合能源系统. 系统必须承担的常规负荷: 电负荷、热负荷和天然气负荷分别是[10 5 10/84] (p.u.).
图7显示了该分布式方法下所有Agent输出的轨迹, 结果表明该方法的求解轨迹在20次迭代内收敛.
我们将“以电定热”的运行方式与应用本文算法的运行方式进行比较分析, 验证不同种类的资源经过协调利用后可以提高综合能源系统的灵活性或经济性.
采用“以电定热”的运行方式, 热电比设为0.8, 与案例2中第一节仿真结果进行对比, 得到相关设备运行功率如附录C中表C6所示, 进而计算两种不同运行方式下综合能源系统的总成本. 应用本文算法的运行方式下的系统总成本为5107.8 ,“以电定热”运行方式下的系统总成本为5352.9. 由此可见, 相比于传统的“以电定热”的多能协调原则, 本文算法可以进一步提高综合能源系统的经济性.
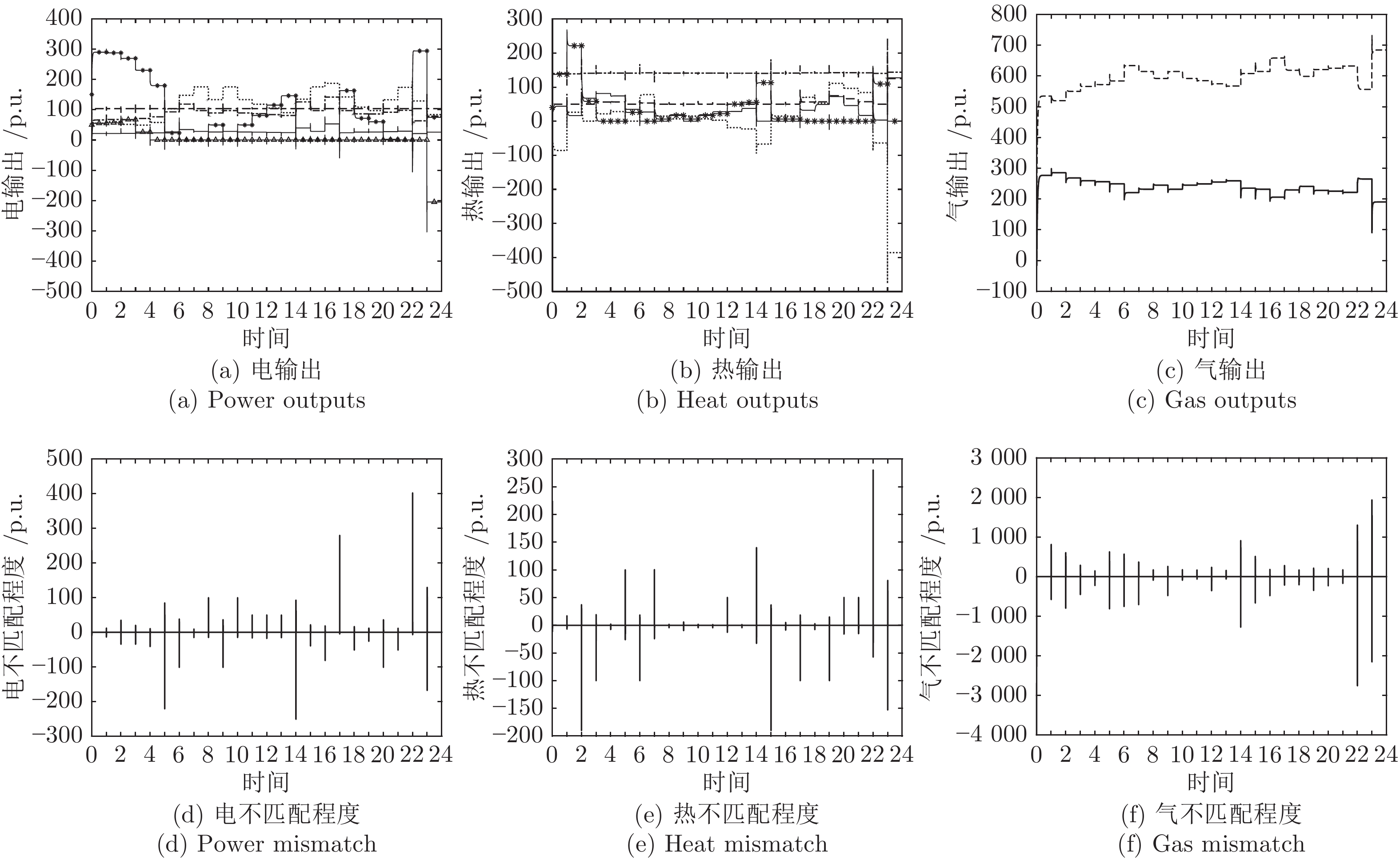
2) 24小时负荷下的多目标优化调度
测试周期为24小时, 每个周期定义为1小时. 各个周期的常规负荷分别是: 电负荷[10 20 40 40 80 300 400 400 300 400 300 250 200 150 400 400 480 200 250 250 350 400 20 10] (p.u.); 热负荷[10 10 200 300 300 200 300 200 200 200 200 200 150 150 10 200 200 300 300 400 350 300 20 10] (p.u.); 气负荷[1 1 2 2 2 2 2 2 3 3 2 2 2 2 1 2 2 1 3 3 3 3 1 1] (p.u.).
如图8所示, 在24小时负荷波动下, 根据所提出的分布式神经动力优化算法, 求解各设备在功率平衡和局部运行约束条件下的最优功率, 以达到经济和环保的目的. 调度结果同时满足机组爬坡约束和储能装置的能量约束. 同时, 通过MATLAB工具箱, 验证了分布式算法的结果与其结果一致, 验证了算法的有效性.
在该算例中, 每个时段都设定了负荷的波动, 如在1 ~ 2时段电网负荷发生变化, 由10 (p.u.)上升到20 (p.u.), 为了满足电力供需平衡, 相关发电设备应调整自身输出功率以应对电负荷波动. 从图8(a) ~ 8(c)中可以看出, 由于成本系数较高, 此时段传统产电机组CG的输出功率并没有提高, 而气网设备FG和CHP等以低成本燃气为输入的产电机组的输出功率提高了. 同理, 当热负荷发生变化时, 电网设备会根据电力负荷的实际情况并考虑成本因素, 调节CHP的运行点和新能源机组制热设备等装置来平衡热负荷的波动. 通过这一算例可以看出, 在合理的调度策略下, 综合能源系统可实现多种能源的协调优化与互补互济, 显著提高能源系统的灵活性与经济性.
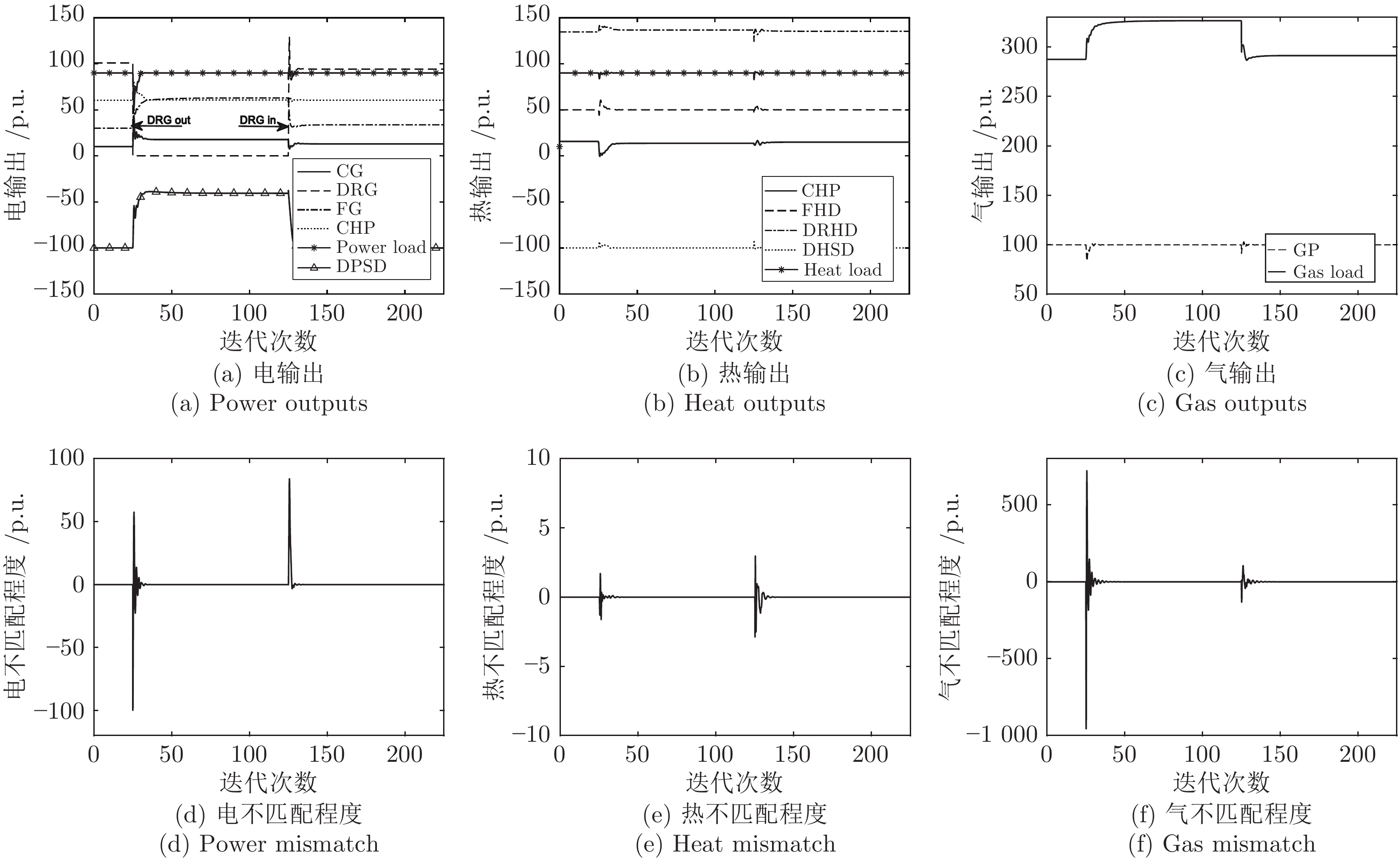
3)即插即用性能测试
在这个案例研究中, 重点是测试该算法的即插即用性能. 模拟现实情况中, 考虑到可再生能源发电的不确定性, 将DRG从系统中去除, 并将与它相关的变量设置为零. 从图9中可以看出, 当DRG退出运行时, 电功率、热功率和产气功率的功率偏差逐渐收敛到零. 同时, 各Agent也收敛到最佳值. 当然, 剩余的能源参与者必须调整它们的电热气的输出/需求, 以补偿先前由断开的DRG所带来的影响, 并且最终收敛到新的解决方案. 此外, 当DRG被再次插入到系统时, 该系统再次收敛到响应新拓扑变化的解决方案, 且此时最终收敛解与断开DRG之前的收敛解相同. 这意味着该算法提供了良好的即插即用能力.
本文针对电−热−气综合能源系统提出了一种新的分布式能源管理方法. 建立了一个相对准确的电−热−气综合能源系统模型, 提出了兼顾系统经济性与环境友好性的多目标优化调度模型. 针对该模型, 提出了一种基于可变权重的神经网络模型的神经动态优化算法, 并对其最优性和收敛性进行理论分析. 通过一个典型综合能源系统的算例仿真, 结果表明各能源参与者协调配合在经济性与环境性前提下保障系统可靠运行. 实验结果验证了所提算法的可行性与有效性. 本文算法虽然没有实现完全分布式, 但其在保证更为重要的目标函数和相应的功率约束的隐私性的前提下, 有效求解复杂的综合能源系统多目标优化调度问题. 我们未来的工作将致力于开发完全分布式算法求解综合能源系统多目标优化调度问题.
证明. 定义
| minw1Ffuel+w2Femissions.t.∑i∈ϑg,i∉ϑDPSDPi,t+∑i∈ϑDPSDPi,t−∑i∈ϑPLPi,t−Ploss≥Ploadm≤Pi,t≤M,i∈ϑ(17),(18) |
式中, 对于不同的设备,
| L(P,λ,μ,ν,α,β)=w1Ffuel+w2Femission+λ(Pload−∑j∈ϑgPj,t+∑i∈ϑPLPi,t+Ploss)+μ(∑lHl,t−∑i∈ϑHLHi,t−Hloss−Hload)+ν(∑i∈ϑGPgi,t−∑ngasn,t−gload)+∑i∈ϑαi(m−Pi,t)+∑i∈ϑβi(Pi,t−M) |
式中,
| ∂L∂P∗i,t=λ−αi+βi−∂f(P∗i,t)∂P∗i,t=0,i∈ϑPL |
| ∂L∂P∗i,t=∂f(P∗i,t)∂P∗i,t−λ(1−2BiiP∗i,t−2∑j≠iBiiP∗j,t)−αi+βi=0,i,j∈ϑg,i,j∉ϑDPSD |
| ∂L∂P∗i,t=∂f(P∗i,t)∂P∗i,t−λ−αi+βi=0,i∈ϑDPSD |
| λ(Pload−∑j∈ϑgP∗j,t+∑i∈ϑPLP∗i,t+P∗loss)=0,λ≥0 |
| ∑jH∗j,t−∑i∈ϑHLH∗i,t−Hloss−Hload=0,j∈ϑDRHD⋃ϑFHD⋃ϑCHP⋃ϑDHSD |
| ∑i∈ϑGPg∗i,t−∑jgas∗j,t−gload=0,j∈ϑFG⋃ϑFHD⋃ϑCHP⋃ϑGL |
| αi(m−P∗i,t)=0,αi≥0,i∈ϑ |
| βi(P∗i,t−M)=0,βi≥0,i∈ϑ |
接下来, 用反证法进行证明. 假设
| Pload+∑i∈ϑPLP∗i,t<∑j∈ϑgP∗j,t−P∗loss |
因此, 对于条件(A2d)成立,
考虑一般情况,
| Pload+∑i∈ϑPLPmaxi,t<∑i∈ϑgPminj,t−Pminloss |
注意式(A4)与充分条件(42)相矛盾. 因此, 式(A3)在充分条件下不能保证得到
| Pload+∑i∈ϑPLP∗i,t=∑i∈ϑgP∗j,t−P∗loss |
因此, 在充分条件下, 转换后的问题总是在第一个约束条件得到等号的情况下得到最优解. 因此, 在条件式(42)下, 原非凸优化问题和式(43a)是等价的. □
证明. 设
考虑以下候选Lyapunov函数:
| V(x,λ,β)=T(x,λ,β)−T(x∗,λ∗,β∗)−(x−x∗)T(ρ∗+(H∗)Tζ∗+kILβ∗)−(λ−λ∗)Tζ∗−kI(β−β∗)TLβ∗+12‖x−x∗‖2+12‖λ−λ∗‖2+12kI(β−β∗)TL(β−β∗) |
令
定义
| T(x,λ,β)=f(x)+12‖(λ+h(x))+‖2+12kPxTLx+kIxTLβ+12kIβTLβ |
根据链式法则, 沿着式(46)的方向对
| ˙V(x(t),λ(t),β(t))=(ρ+HTζ+kPLx+kILβ−ρ∗−(H∗)Tζ∗−kILβ∗+x−x∗)Tdxdt+(ζ−ζ∗+λ−λ∗)Tdλdt+(kILx+kILβ+kIL(β−β∗)−kILβ∗)Tdβdt |
令
| Q1=2(ρ+HTζ+kPLx+kILβ−ρ∗−kILβ∗−(H∗)Tζ∗+x−x∗)T(ξ−x∗)Q2=2(ρ+kPLx+kILβ−−ρ∗−kILβ∗+xx∗)T(x∗−x)+2kI(L(β−β∗))Tx+kIxTLxQ3=(ζ−ζ∗+λ−λ∗)T(−λ+ζ)+2(HTζ−(H∗)Tζ∗)T(x∗−x) |
对于
| Q1=−2(x−ρ−HTζ−kPLx−kILβ−ξ)T(ξ−x∗)−2(ρ∗+(H∗)Tζ∗+kILβ∗)T(ξ−x∗)−2‖x−ξ‖2+2‖x−x∗‖2 |
| x∗=(I−P)(x∗−ρ∗−(H∗)Tλ∗−kILβ∗)+q |
根据
| −2(x−ρ−HTζ−kPLx−kILβ−ξ)T(ξ−x∗)=0 |
因为
| ξ−x∗=(I−P)(ξ−x∗) |
所以
| Q1=−2‖x−ξ‖2+2‖x−x∗‖2 |
对于
| Q2=2(ρ−ρ∗)T(x∗−x)+2(x−x∗)T(x∗−x)+(−2kP+kI)xTLx |
由于
| (x∗−x)T(ρ−ρ∗)≤0 |
所以
| Q2≤−2‖x−x∗‖2+(−2kP+kI)xTLx |
对于
| Q3=−‖λ−ζ‖2+2ζT(−λ+ζ−H(x−x∗))−2(ζ∗)T(−λ+ζ−H∗(x−x∗)) |
注意:
| λ+h(x)=(λ+h(x))+−(−λ−h(x))+ |
所以
| Q3=−‖λ−ζ‖2+2ζT(h(x)−h(x∗)−H(x−x∗))+2ζT(h(x∗)+(−λ−h(x))+)−2(ζ∗)T(h(x)−h(x∗)−H(x−x∗))−2(ζ∗)T(h(x∗)+(−λ−h(x))+) |
| Q3≤−‖λ−ζ‖2 |
所以
| ˙V≤−2‖x−ξ‖2+(−2kP+kI)xTLx−‖λ−ζ‖2=−2‖Px−q−(I−P)(ρ+HTζ+kPLx+kILβ)‖2+(−2kP+kI)xTLx−‖−λ+(λ+h(x))+‖2≤0 |
由于
| T(x,λ,β)−T(x∗,λ∗,β∗)≥(x−x∗)T(ρ∗+(H∗)Tζ∗+kILβ∗)+(λ−λ∗)Tζ∗+kI(β−β∗)TLβ∗ |
所以
| V(x,λ,β)≥12‖x−x∗‖2+12‖λ−λ∗‖2+12kI(β−β∗)TL(β−β∗)≥0 |
由拉塞尔不变集原理,当
CHP的可行域为
| −PCHPi,t−0.1736HCHPi,t+63≤0,−PCHPi,t+2.8125HCHPi,t−298.3125≤0,PCHPi,t+0.359HCHPi,t−187≤0,−HCHPi,t≤0 |
电网传输损耗系数矩阵
| B=[49141515144516201516391015201040]×10−6 |