 0373-5939925
0373-5939925 2851259250@qq.com
2851259250@qq.com

区间二型模糊免疫PID在环己烷无催化氧化温度控制系统中的应用
化工生产在国民经济生产活动中占有较大比重,但由于其规模大、工艺复杂、生产原料及产品具有易燃易爆性等特点,其生产过程具有高度危险性。一旦发生化工生产事故,将对国民经济、人员安全和周边环境造成巨大损失。环己烷无催化氧化过程是一个容易发生危险事故的复杂反应过程。环己烷无催化氧化工艺流程如图1所示,整个反应器由五个气升式环流反应器串联组成,首先苯和氢气在催化剂的助推下发生气相加氢反应并生产出高质量的液态环己烷。然后液相环己烷经过换热器加热到160℃左右由第一个反应器的底部自下而上进入反应器,按顺序依次经过剩下的四个反应器。氧气、空气和氮气组成含有一定量氧气的空气先进入空气分布器,通过空气分布器的调节作用使其自下而上流入各个反应器,同时推动反应器底部的液体向上流动,在反应器上部发生化学反应,反应结束后生成的反应物在反应器顶部进行气液分离。这时未参加反应的氧气、环己烷蒸气,以及产生的一氧化碳和二氧化碳气体进入尾气管道,将气态环己烷冷凝分离,而液相则流入下一个反应器底部继续反应。反应器内有夹套和蛇形管。反应过程中,蒸汽流经反应器内的夹套进行加热,蛇形管内有循环冷却水对反应器进行冷却[1-4]。
图1
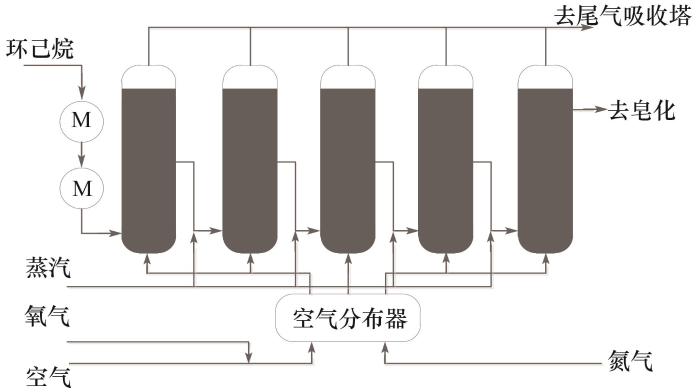
图1 环己烷无催化氧化工艺流程图
Fig.1 Flow chart of uncatalysed oxidation of cyclohexane
环己烷无催化氧化过程是一个放热过程,反应温度一般在430~460℃之间。反应温度过高,中间产物环己基过氧化物的热不稳定性增强,副产物产量增加;如果反应温度过低,反应器尾气中的氧气浓度会升高,给生产过程带来很大的危险。此外,环己烷无催化氧化是一个复杂化学过程,具有非线性、多变量耦合和大时滞的特点,这使得传统的控制方案难以达到预期的效果,一旦反应温度失控会带来严重的安全隐患。因此,采用智能控制方案来进行复杂化工过程的控制是一个趋势。
近年来,区间二型模糊逻辑系统(interval type-2 fuzzy logic system,IT2FLS)在过程控制等领域得到了广泛应用[5-8]。IT2FLS在模糊化及模糊推理过程中使用了区间二型模糊集合(interval type-2 fuzzy set,IT2FS),它通过不确定性足迹(footprint of uncertainty,FOU)扩展了维数运算,使IT2FLS扩展了系统设计的自由度和模糊推理的能力,其处理不确定性的能力也有所提高[9-11]。Zhao等[12]设计了一种区间二型模糊逻辑控制器(interval type-2 fuzzy logic controller,IT2FLC),并将其成功地应用到了双容水箱液位控制中,验证了IT2FLC的抗干扰性能。Galluzzo等[13]设计了一种IT2FLC,并将其成功地应用到了连续生物反应器混合废物的生物降解问题中,将仿真结果与传统的模糊控制器进行了比较。王永富等[14]提出了一种自适应IT2FLC,应用到了质子交换膜燃料电池的过氧比控制问题中,仿真结果显示提出的控制器具有良好的鲁棒性、跟踪性能及自适应特性。Kumbasar等[15]设计了一种基于IT2FLS的逆控制器,利用IT2FLS来逼近过程模型,最后将提出的控制器应用到了pH中和过程问题中,取得了比基于传统模糊系统的逆控制器更好的控制效果。Miccio等[16]提出了一种区间二型模糊PID控制器并成功地用于精馏塔的控制问题中,将仿真结果与模糊PID控制器进行了比较,取得了良好的控制效果。Han等[17]提出一种二型模糊广义学习控制器,该控制器可以通过自适应学习律在线调整参数,提升了控制器的鲁棒性,最后应用到了污水处理过程溶解氧浓度控制问题中,取得了理想的控制效果。何青等[18]提出了一种基于二型模糊变积分的PID控制器并用于无刷直流电机的转速控制,仿真结果表明该方法具有良好的鲁棒性能。李天等[19]提出了一种基于区间二型模糊逆模型的控制方案,并在乙烯裂解炉出口温度系统中进行了验证,实现了对出口温度平稳高效的控制。Liao等[20]提出了一种基于二型T-S模糊模型的分散控制方案,可以把多输入多输出的过程转化为多个独立的单回路进行控制器设计,并且无须知道系统的精确数学模型,利用二型T-S模糊模型逼近被控过程,构建了模糊鲁棒控制器,最后在多级蒸发器制冷系统中验证了该方法的有效性。
免疫是生物体体内的一系列特性生理反应组成的防御系统,通过协调主反馈机理与抑制机理的互动作用,完成对外来侵犯的保护与免疫。生物免疫系统是一个复杂系统,具有显著抵抗抗原的适应性能力,在不确定及强干扰的环境中具有较强的适应性和鲁棒性。生物免疫系统所具备的这些智能行为,从理论和技术上为解决一些科学和工程领域问题提供了一种新的思路。王玉勤等[21]提出了一种免疫PID控制算法,并成功地将其应用到了吊车-双摆控制系统,实验结果与线性二次型最优控制器相比,稳定性与鲁棒性都更优。李琦等[22]提出了一种改进免疫PID算法,利用遗传算法对免疫PID中的参数进行离线优化,并成功地应用到了双容水箱液位控制中,取得了预期的控制效果。任重昕等[23]将传统PID控制器与免疫控制器串联起来,设计了一种免疫非线性PID控制器,并成功地将其应用在了热磨机料位控制系统。Peng等[24]提出了一种串级免疫PID控制系统并应用到了主蒸汽温度控制系统中。Wang等[25]基于免疫反馈规则设计了免疫PID控制方案并将其成功地应用于干燥器温度控制系统。
本文结合免疫PID算法和IT2FLS的优点,提出一种区间二型模糊免疫PID(interval type-2 fuzzy immune PID,IT2FIPID)控制器。该控制器本质上是一种基于免疫PID的非线性控制器,利用IT2FLS的万能逼近特性来逼近免疫反馈控制律中的非线性函数,这样可以有效地处理具有时变和大延迟的复杂非线性系统。最后,将所提出的IT2FIPID控制器应用于环己烷无催化氧化温度控制系统。
1 区间二型模糊免疫PID系统的结构
1.1 免疫PID控制器
免疫是生物体特有的一种生理现象。生物免疫系统可以产生相应的抗体来抵抗外部入侵的抗原。当抗体与抗原相遇结合后,会激发一系列的反应机制,这时抗体会产生一种特殊酶来破坏抗原或者直接通过吞噬作用消灭抗原。淋巴细胞和抗体分子构成了生物免疫系统,淋巴细胞包括胸腺产生的T细胞(主要是辅助细胞
其中,
这里偏差
其中,反应速度由
由
结合免疫控制律
其中,比例系数
1.2 区间二型模糊免疫PID(IT2FIPID)系统
FLS的优点是将技术人员或专家的经验转化为规则,系统可以根据规则进行推理和决策,实现自动控制、分类、辨识等特定任务。IT2FLS不仅具有FLS的优点,而且在处理不确定性和复杂非线性问题方面更有优势。免疫PID具有结构简单、易于实现、鲁棒性和自适应能力强等特点。本文利用IT2FLS具备的万能逼近特性来逼近免疫PID系统的非线性函数
图2
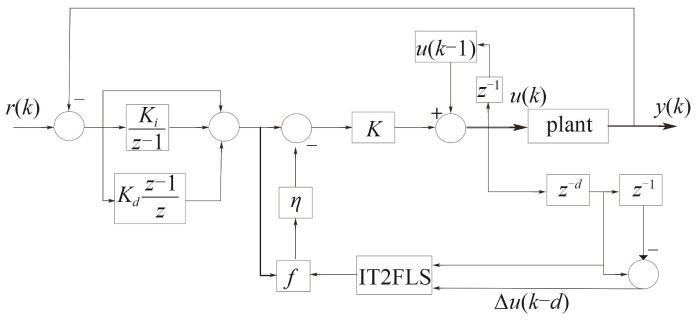
图2 IT2FIPID控制系统框图
Fig.2 Block diagram of IT2FIPID control system
IT2FLS由五部分组成:模糊化(fuzzification)、规则库(rule base)、推理机(inference engine)、降型(reduction)和解模糊(defuzzifier),如图3所示。与传统的FLS相比,由于在模糊化和模糊推理过程中使用了IT2FS,因此,在得到系统的最终输出之前,必须经历将IT2FS转化为普通集合的过程,即IT2FLS的降型过程[27-30]。下面具体给出IT2FLS各部分的功能与作用。
图3
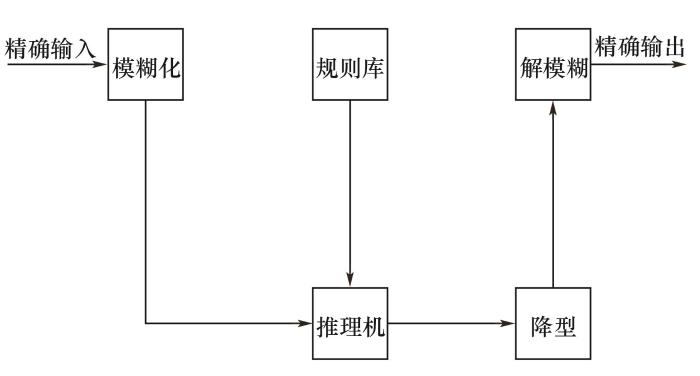
图3 区间二型模糊系统的结构框图
Fig.3 The block diagram of IT2FLS
模糊化:本文中的IT2FLS是一个两输入单输出的系统。输入变量是控制变量
图4

图4 控制变量的隶属函数
Fig.4 Membership function of control variable
图5
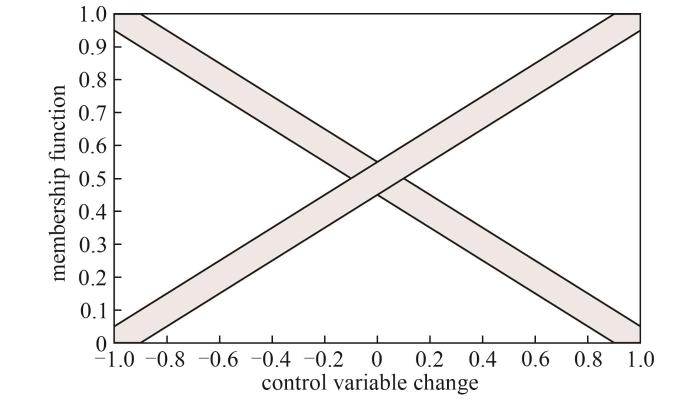
图5 控制变量变化的隶属函数
Fig.5 Membership function of control variable change
图6
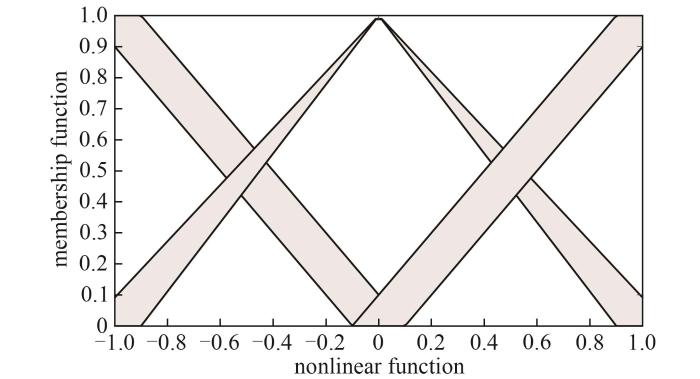
图6 非线性函数的隶属函数
Fig.6 Membership function of nonlinear function
规则库:本文中IT2FLS规则的确定与细胞接受的刺激有关,刺激大则抑制能力弱,刺激小则抑制能力强。最终确定IT2FLS的规则库由4条模糊规则组成:
(1)
(2)
(3)
(4)
推理机与降型:推理机的作用是将输入变量的模糊集合通过与规则表示的模糊关系进行合成运算。这里IT2FLS的输入变量首先经过模糊化的作用转化为IT2FS,然后与模糊规则前件作用产生激励强度,最后与模糊规则后件部分作用产生输出,得到的也是一个IT2FS,再经过降型过程处理得到普通模糊集合。目前,最为常见的中心集降型法的计算如
其中,
式中的转折点L和R必须满足下面的约束条件:
IT2FLS降型的目的就是计算得到
(1)将
(2)计算
(3)找到
(4)当
(5)更新
(6)更新
(7)令
解模糊:降型过程的输出
2 仿真研究
2.1 环己烷无催化氧化温度控制系统的数学模型
环己烷无催化氧化过程是一个具有非线性、时变、大滞后的复杂化学变化。许多复杂化工过程都可以用一个一阶惯性环节加上纯滞后来近似表示。这里,采用阶跃测试的方法,通过对某石化公司尼龙盐厂现场数据的测试与分析得到环己烷无催化氧化温度控制系统的数学模型。首先,根据环己烷无催化氧化过程工艺特点,反应温度主要由蒸汽流量和冷却水流量控制,冷却水的流量相对于蒸汽流量受温度、压力等因素影响小,故本文中将冷却水流量近似认为恒定,所以整个控制系统的操纵变量为蒸汽流量,被控变量为反应温度。其次,在做阶跃测试时,具体施加的阶跃信号幅度,将充分考虑工艺操作要求及装置的实际生产情况,并与相关工艺操作人员协商后确定。在不影响正常生产且保障安全的条件下,施加的阶跃信号幅度应尽可能地激励出过程的动态和稳态特性,一般流量的阶跃信号幅度应保持在量程的5%~10%,并且在测试过程中每次施加的测试信号包括一个正向阶跃和一个负向阶跃。最后,根据系统产生的响应以及输入输出数据,对其进行预平滑和滤波处理,利用系统辨识的方法进行模型拟合。为了保证模型的精度和可靠性,在测试过程中,除非发生工艺参数超出安全范围的情况,否则测试人员不准干扰测试过程,一旦遇到各种未知干扰的影响,要对实验数据做详细记录,为删除不合理的数据提供依据,然后对不满足要求的测试结果,进行多次的阶跃测试,直至取得满意的测试结果。最终得到环己烷无催化氧化温度控制系统的数学模型如
2.2 仿真及性能比较
环己烷无催化氧化过程的正常反应温度在430~460℃之间。当反应温度低于380℃时,尾氧浓度会超过5%,达到高危水平,如果反应温度过高,环己烷选择性降低,副产物增多,达到反应器内环己烷的自燃点会造成严重事故。因此,本文中温度控制系统的设定值设置在440℃。仿真硬件环境为联想Thinkpad T480计算机,操作系统为Windows 10,处理器为Intel Core i5-8250U(1.6 GHz),运行内存8 GB;仿真软件使用MATLAB,其版本为R2018b。为了公平地与其他方法进行比较,引入误差绝对值积分(integral of absolute error, IAE)和误差平方积分(integral of square error, ISE)2个性能指标,具体计算公式如
式中,
提出的IT2FIPID控制器中,参数
图7
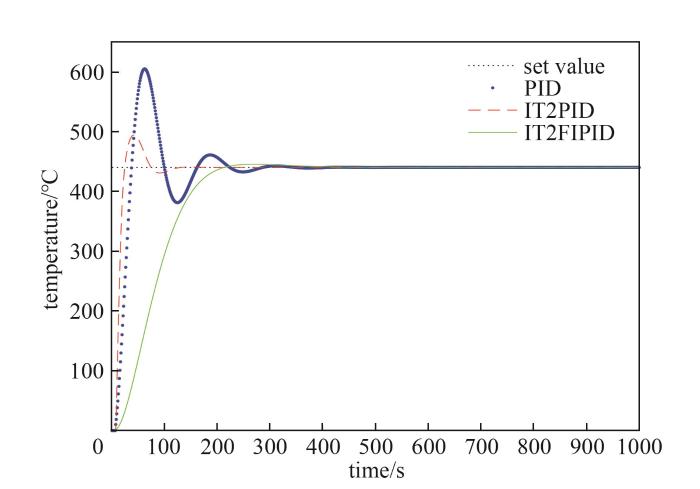
图7 温度控制系统仿真结果
Fig.7 Simulation results of temperature control system
图8
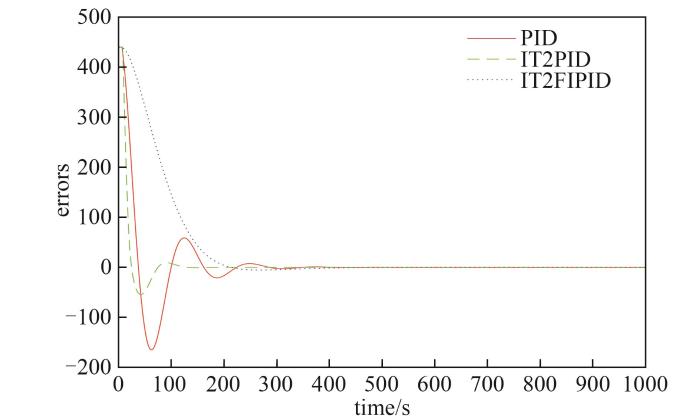
图8 控制误差曲线
Fig.8 Curves of control error
图9
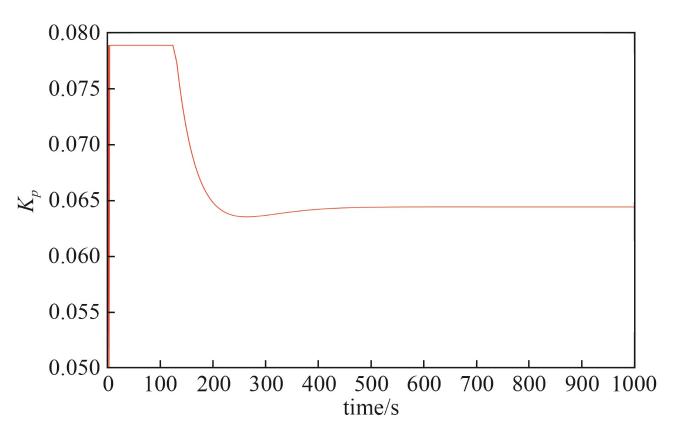
图9
Fig.9 The self-tuning result of
表1中列出了提出的IT2FIPID控制器与PID控制器、区间二型模糊PID(interval type-2 fuzzy PID,IT2FPID)控制器的模糊规则数、超调量、IAE值和ISE值。
表1 三种控制器的性能指标值
Table 1
| 控制器 | 模糊规则数 | 超调量 | IAE值 | ISE值 |
|---|---|---|---|---|
| PID | - | 37.45 | 1.9953×104 | 4.4336×106 |
| IT2FPID | 49 | 12.30 | 8.2471×103 | 2.3575×106 |
| IT2FIPID | 4 | 0 | 3.7477×104 | 1.1214×107 |
新窗口打开| 下载CSV
从以上仿真结果可以看出,本文提出的IT2FIPID控制器的温度曲线虽然上升较慢,但没有超调量,也没有出现温度骤升或骤降的现象,而与之对应的传统PID控制器的温度曲线的超调量很大、振荡明显,这在工艺现场是不允许的。与IT2FPID控制器相比,本文提出的控制器结构简单(只有4条模糊规则)、可维护性高,虽然IAE值和ISE值比IT2FPID方法大,主要是由于调节时间较慢引起的,但控制精度已完全满足工艺要求,而IT2FPID方法的超调量达到了12.30%,温度的最大值达到了494℃,已经超出了工艺的要求,对装置生产的平稳和安全是不利的。虽然提出的IT2FIPID控制器调节时间慢些,但对于连续生产的装置是可以接受的,而且能够有效抑制超调,控制精度较高,鲁棒性强,动态特性好,因而适合复杂化工过程的控制。
3 结论
本文提出了一种IT2FIPID控制器来解决复杂化工过程的控制问题。仿真结果表明,该系统具有良好的鲁棒性,其控制质量优于传统的PID控制。 该方法为具有非线性、大时滞的复杂工业过程的控制提供了一种新的有效思路,具有一定的工程实用价值。

- 我用了一个很复杂的图,帮你们解释下“23版最新北大核心目录有效期问题”。
- 重磅!CSSCI来源期刊(2023-2024版)最新期刊目录看点分析!全网首发!
- CSSCI官方早就公布了最新南核目录,有心的人已经拿到并且投入使用!附南核目录新增期刊!
- 北大核心期刊目录换届,我们应该熟知的10个知识点。
- 注意,最新期刊论文格式标准已发布,论文写作规则发生重大变化!文字版GB/T 7713.2—2022 学术论文编写规则
- 盘点那些评职称超管用的资源,1,3和5已经“绝种”了
- 职称话题| 为什么党校更认可省市级党报?是否有什么说据?还有哪些机构认可党报?
- 《农业经济》论文投稿解析,难度指数四颗星,附好发选题!
- 期刊知识:学位论文完成后是否可以拆分成期刊论文发表?
- 号外!出书的人注意啦:近期专著书号有空缺!!

