0373-5939925
0373-5939925 2851259250@qq.com
2851259250@qq.com

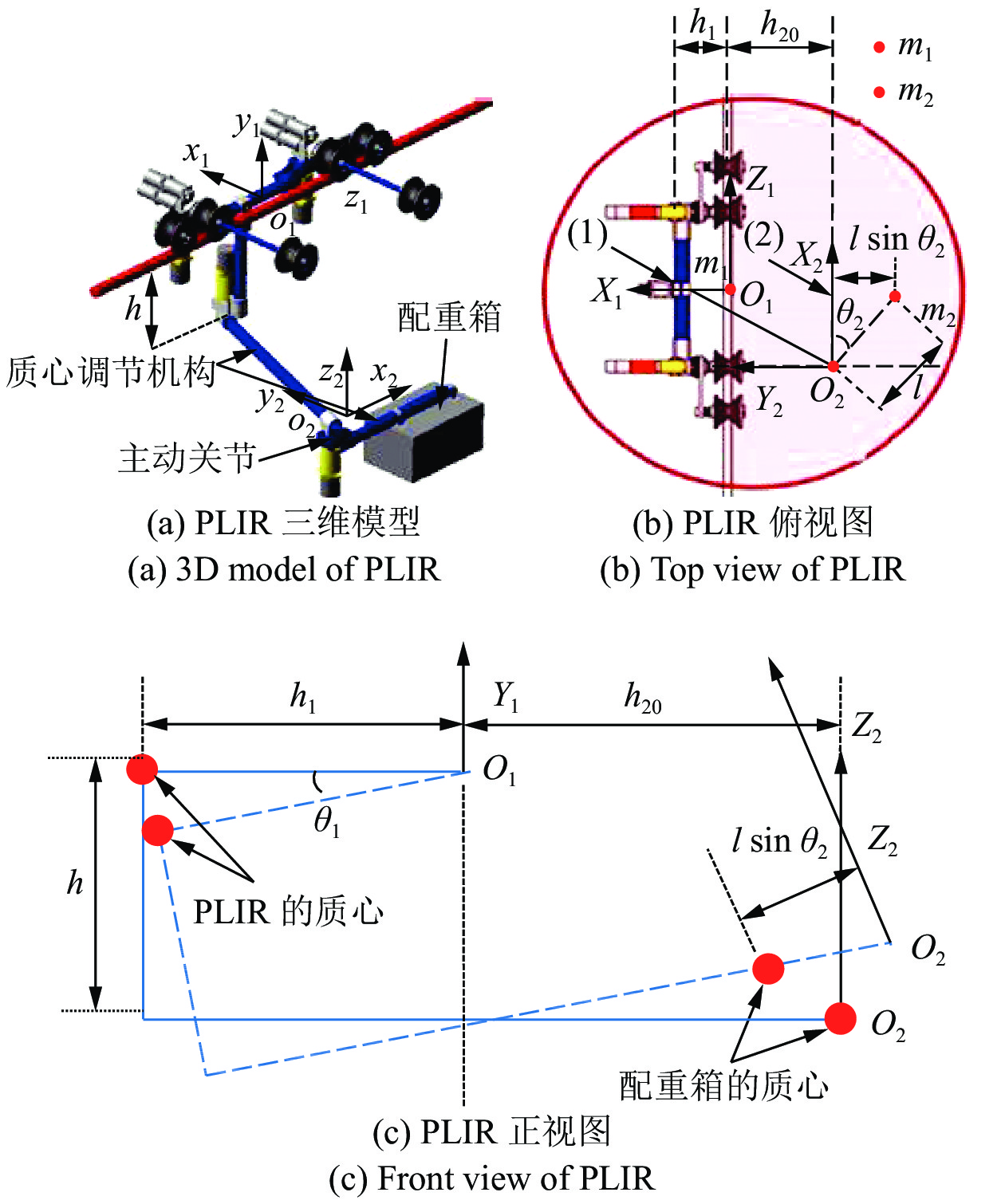
图 1 PLIR模型
Fig. 1 The model of PLIR
高压输电线会在环境和机械的作用下出现一些故障或安全隐患, 例如绝缘子老化破损、导线断股、金具氧化腐蚀等, 若不能及时地排除这些问题, 可能会导致重大的事故. 所以高压输电线的巡检一直是供电企业的重要工作. 长时间以来, 我国高压输电线路的巡检工作都是通过人工完成的, 这不仅耗时耗力, 而且高压输电线常常会跨过高山以及江河这些人工难以到达的地方, 从而出现了巡检盲区. 为了使巡检工作变得更加高效和准确, 我国自上世纪90 年代中期开始针对电力巡检机器人(Power-line inspection robot, PLIR)做了大量的研究[1-6], 用PLIR来代替人工进行高压输电线的巡查和维护. PLIR具有较高的效率和可靠性, 并且能轻易到达人工无法到达的巡检盲区. 因此, PLIR的研究具有重大的意义. PLIR在高压输电线上移动时, 需要面对许多的不确定性, 例如风力的干扰和电线的振动, 所以要对它进行控制使其达到平衡. 文献[7-11]提供的方法能够对PLIR的平衡进行控制, 然而这些控制器的设计方法需要利用被控对象精确的物理模型, 并且很少考虑一些不确定因素.
1975年, Mamdani等成功地将I型模糊逻辑控制器(Type-1 fuzzy logic controller, T1FLC)应用在蒸汽机的控制当中[12]. 模糊逻辑控制器的设计不需要依赖精确的数学模型, 而仅需要由专家经验总结出的模糊规则. 不仅如此, 模糊逻辑控制器还具有处理不确定性的能力. 因此, T1FLC得到了大量的研究, 广泛运用于各种领域[13-23]. 广义II型模糊逻辑控制器(General type-2 fuzzy logic controller, GT2FLC)是在T1FLC 的基础上提出来的, GT2FLC具有三维结构的隶属函数, 使得控制系统处理不确定性的能力增强, 所以得到广泛的关注[24-27]. 但同时, 三维结构的隶属函数使得GT2FLC的运算复杂度也增加了许多. 区间II型模糊控制器(Interval type-2 fuzzy logic controller, IT2FLC)相比于GT2FLC, 通过牺牲一些控制性能来减少运算复杂度, 也得到了广泛应用[28-29]. 为了简化广义II型模糊集(General type-2 fuzzy set, GT2FS)的运算, Mendel等[30]提出了用
在模糊逻辑控制器中, 隶属函数参数的选取对整个控制系统具有极大的影响. 一般情况下, 隶属函数参数的选取多是依赖于经验或者实验数据, 但随着控制精度要求的变高和被控系统的复杂性增加, 传统的参数选取方法已经很难达到要求. 尤其是在GT2FLC中, 三维结构的隶属函数使得整个控制系统无论是参数维数还是复杂度都大大增加. 因此, 在大量文献中, 提出了用优化算法来优化隶属函数参数的方法, 使得控制系统的性能更好[31-35].
粒子群优化算法(Particle swarm optimization, PSO)是应用比较广泛的一种群智能优化算法, 是Eberhart等在对鸟群捕食行为进行研究的基础上提出来的. 此后, 专家提出了许多改进的PSO算法, 并且将其应用于不同的领域上[36-38]. Shi 等[39]在基本的PSO算法上引入了惯性权重这一概念, 提出了标准PSO 算法. 惯性权重在标准PSO算法中具有平衡全局和局部寻优的能力. 在此基础上, 文献[40]提出了一种惯性权重线性递减的方法来改善标准PSO算法的寻优能力. 然而, 对于一些非线性系统, 这种线性递减的惯性权重并不完全适用. 文献[41]提出了一种通过模糊逻辑系统来调整惯性权重的PSO算法, 使得惯性权重的调整更加合理.
本文的创新点如下: 1)针对PLIR平衡调节问题, 设计了GT2FLC; 2) 针对GT2FLC系统中隶属函数参数多并且难以确定的问题, 基于FPSO (Fuzzy PSO)算法来优化GT2FLC中的隶属函数参数, 从而增加GT2FLC的性能; 3) 通过仿真验证了GT2FLC相比于IT2FLC和T1FLC 具有更好的性能和处理不确定性的能力.
在本节中, 我们针对PLIR的工作原理进行介绍[1]. PLIR在高压输电线上作业时, 需要通过质心调节机构的调节来保持平衡, 其模型如图1所示. PLIR关于平衡调节的动力学方程可以通过欧拉−拉格朗日方程得到, 欧拉−拉格朗日方程表示为[42]
| (1) |
其中,
| (2) |
其中,
| (3) |
| (4) |
其中,
| (5) |
将式(5)代入到式(4)中, 可得:
| (6) |
最终, 将式(3)和式(6)代入到式(1)中, 得到PLIR平衡调节的动力学方程, 表示为
| (7) |
其中,
| (8) |
在本文中,
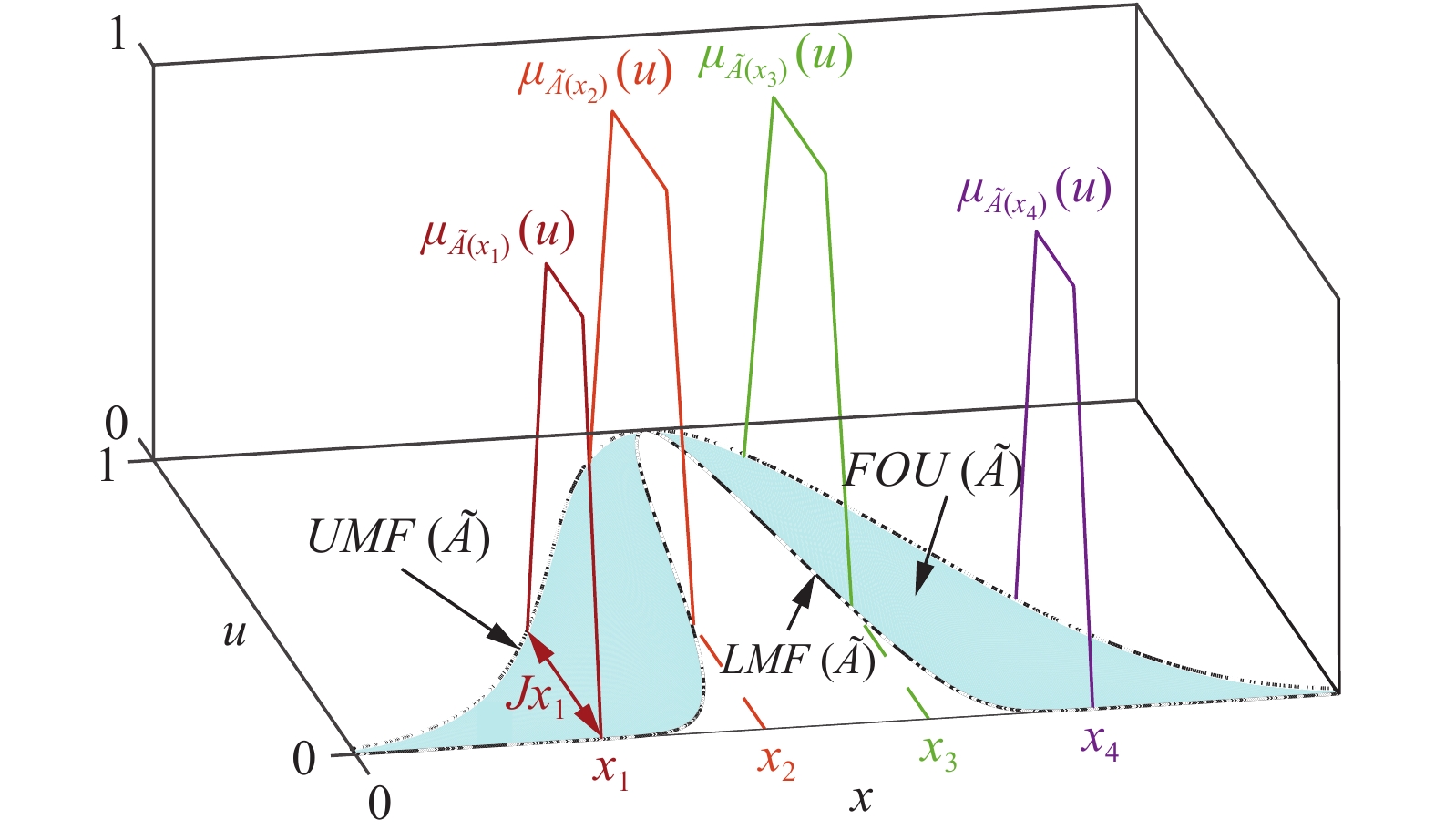
一个GT2FS记为
| (9) |
其中,
| (10) |
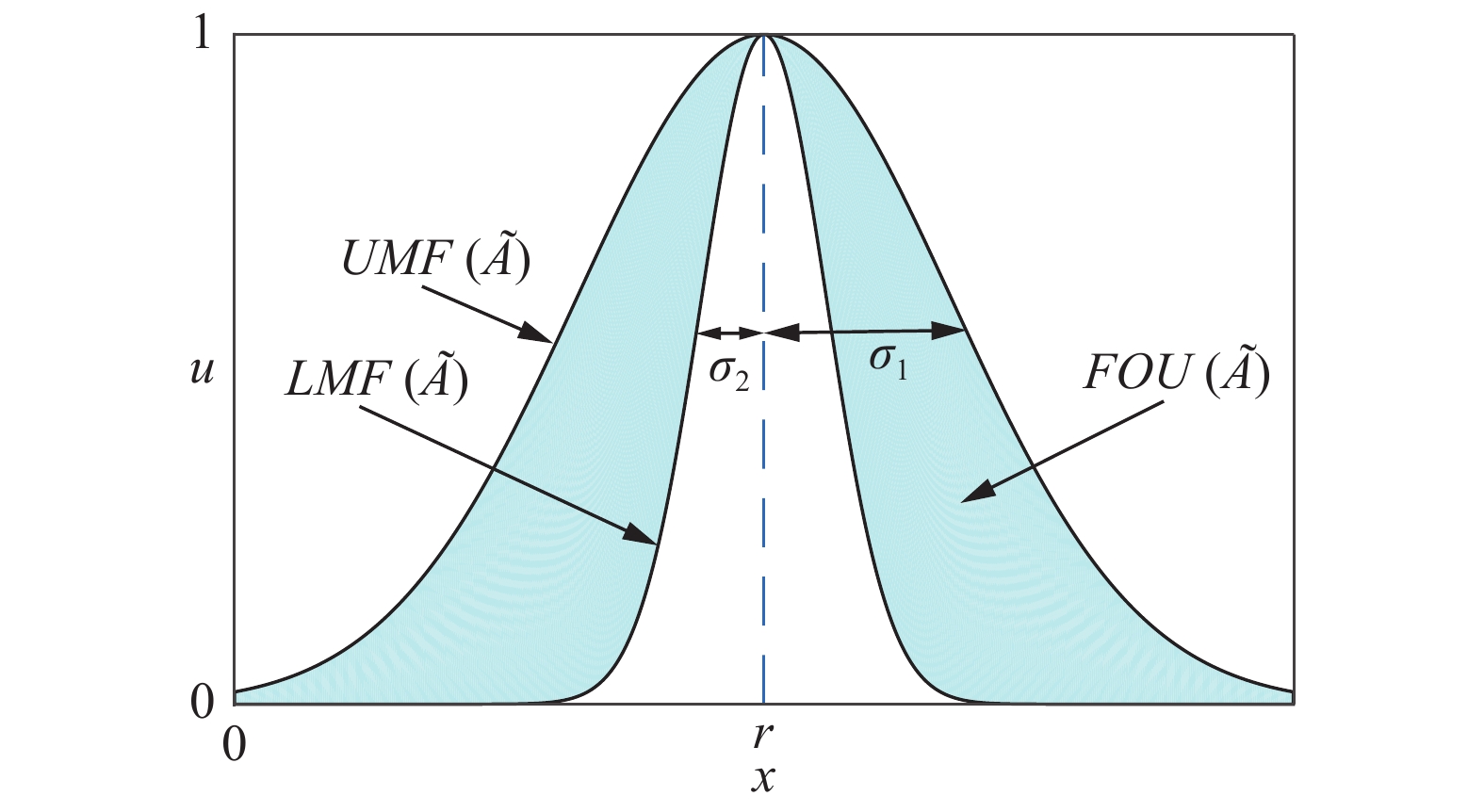
如图3所示, FOU被它的上、下隶属函数所包含. 其上、下隶属函数分别为
| (11) |
| (12) |
为了使GT2FS的表示更加简便, 文献[26]提出了GT2FS的垂直切片表示法
| (13) |
| (14) |
其中,
Mendel等[30]通过
| (15) |
GT2FS的一个
| (16) |
最终, 一个GT2FS可以看作是
| (17) |
在
| (18) |
一个GT2FLC由模糊器、模糊推理机、规则库、降型器、解模糊器这五个部分组成. 模糊器通过隶属函数, 能将精确的输入量映射到模糊空间中, 成为输入的GT2FS. 输入的GT2FS按照规则库中的模糊规则, 在推理机中通过模糊逻辑原理得到输出的GT2FS. 输出的GT2FS经过降型器和解模糊器得到精确的输出量.
在GT2FLC中, 隶属函数的上、下隶属函数通常为三角型、高斯和梯型, 次隶属函数通常为梯形、三角型和梯形. 规则库中的规则一般通过专家知识建立的, 一般用IF-THEN语句来表示. 在控制系统中有
| (19) |
其中,
| (20) |
| (21) |
其中,
| (22) |
其中,
| (23) |
其中,
在标准PSO算法中, 对于一个
| (24) |
其中,
| (25) |
| (26) |
在标准PSO中, 第
| (27) |
其中,
| (28) |
其中,
| (29) |
在粒子更新位置, 位置要在一定的范围内, 即
| (30) |
其中,
在FPSO中, 通过一个一型模糊逻辑系统(Type-1 fuzzy logic system, T1FLS)来调整惯性权重的值. 在算法迭代前期, 惯性权重取较大值, 使得粒子具有更好的全局搜索能力, 反之, 在算法迭代后期, 惯性权重取较小值, 使得粒子具有更好的局部搜索能力.
当前迭代次数
| (31) |
| (32) |
其中,
| (33) |
| (34) |
其中,
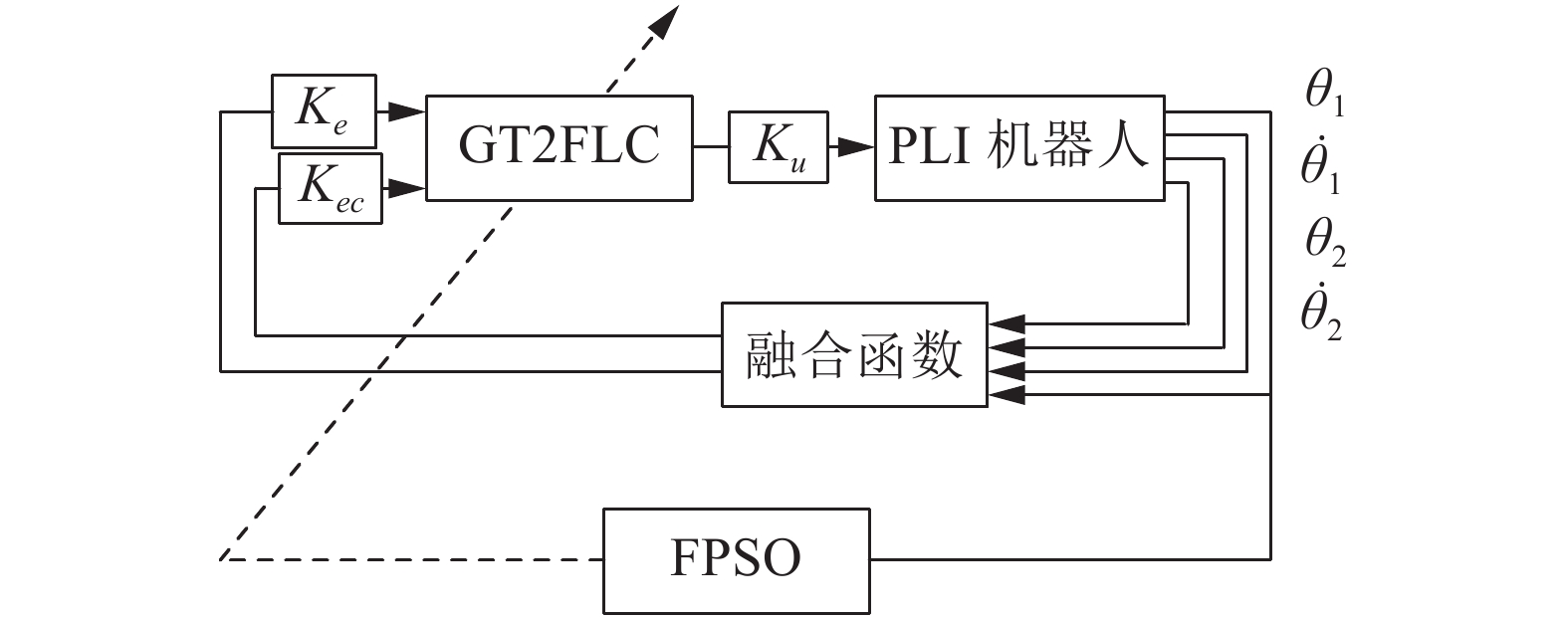
本节针对PLIR平衡调节的问题, 设计了一个GT2FLC. 基于FPSO算法, 对GT2FLC的隶属函数参数进行优化, 使得控制性能增强. 图6为电力巡检机器人的平衡控制优化的原理图.
我们将PLIR的4 个状态变量
| (35) |
其中,
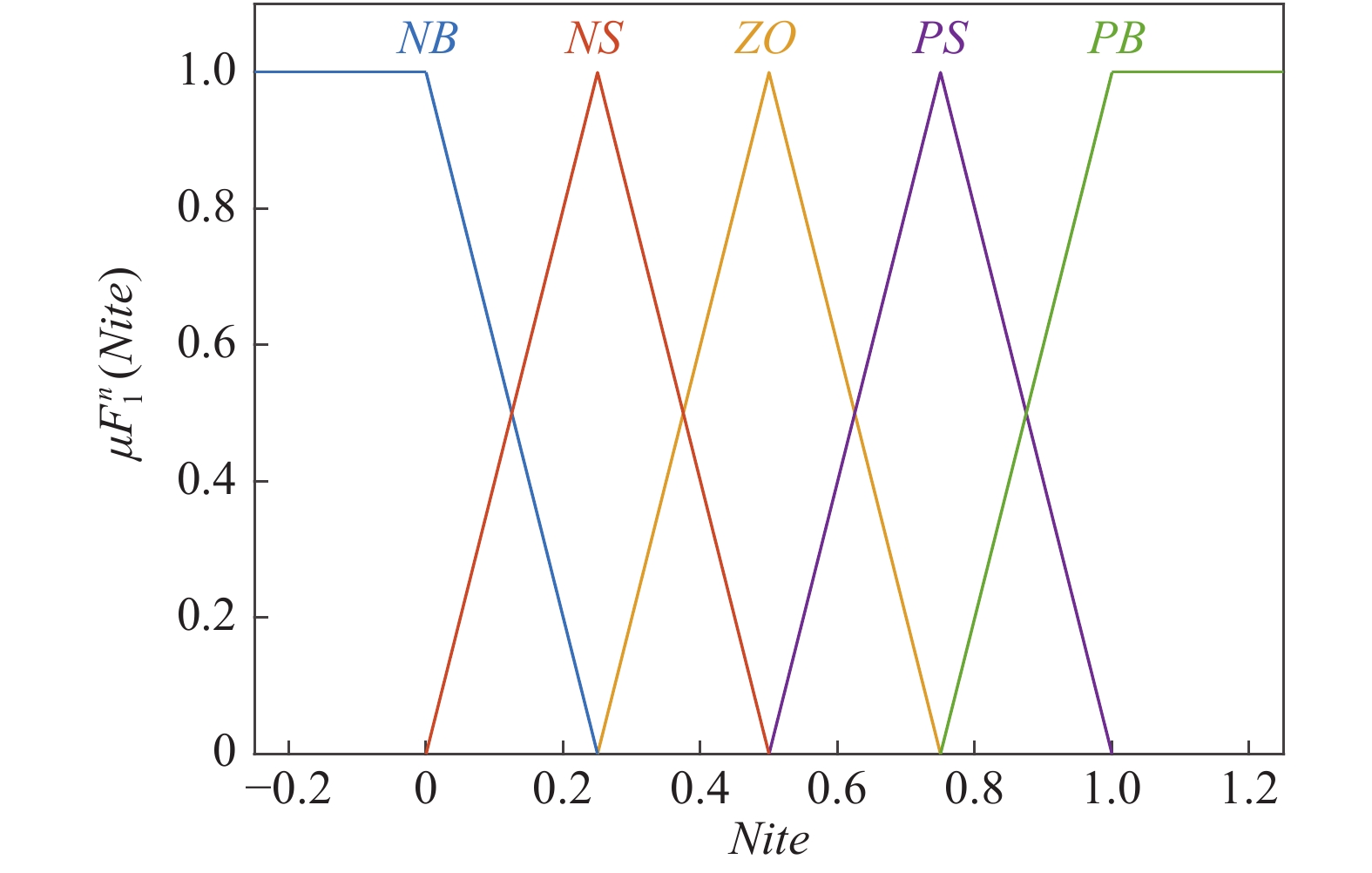
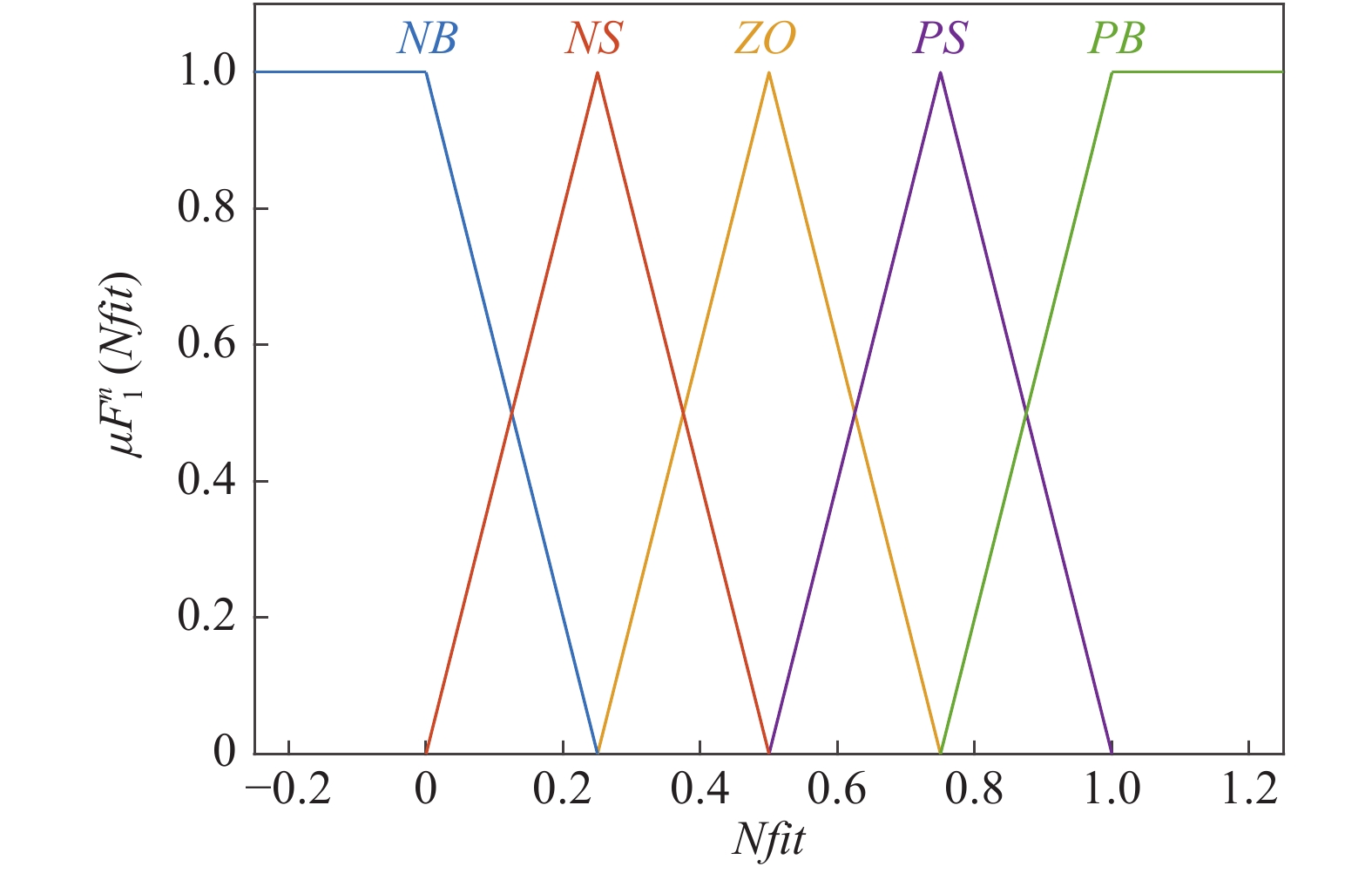
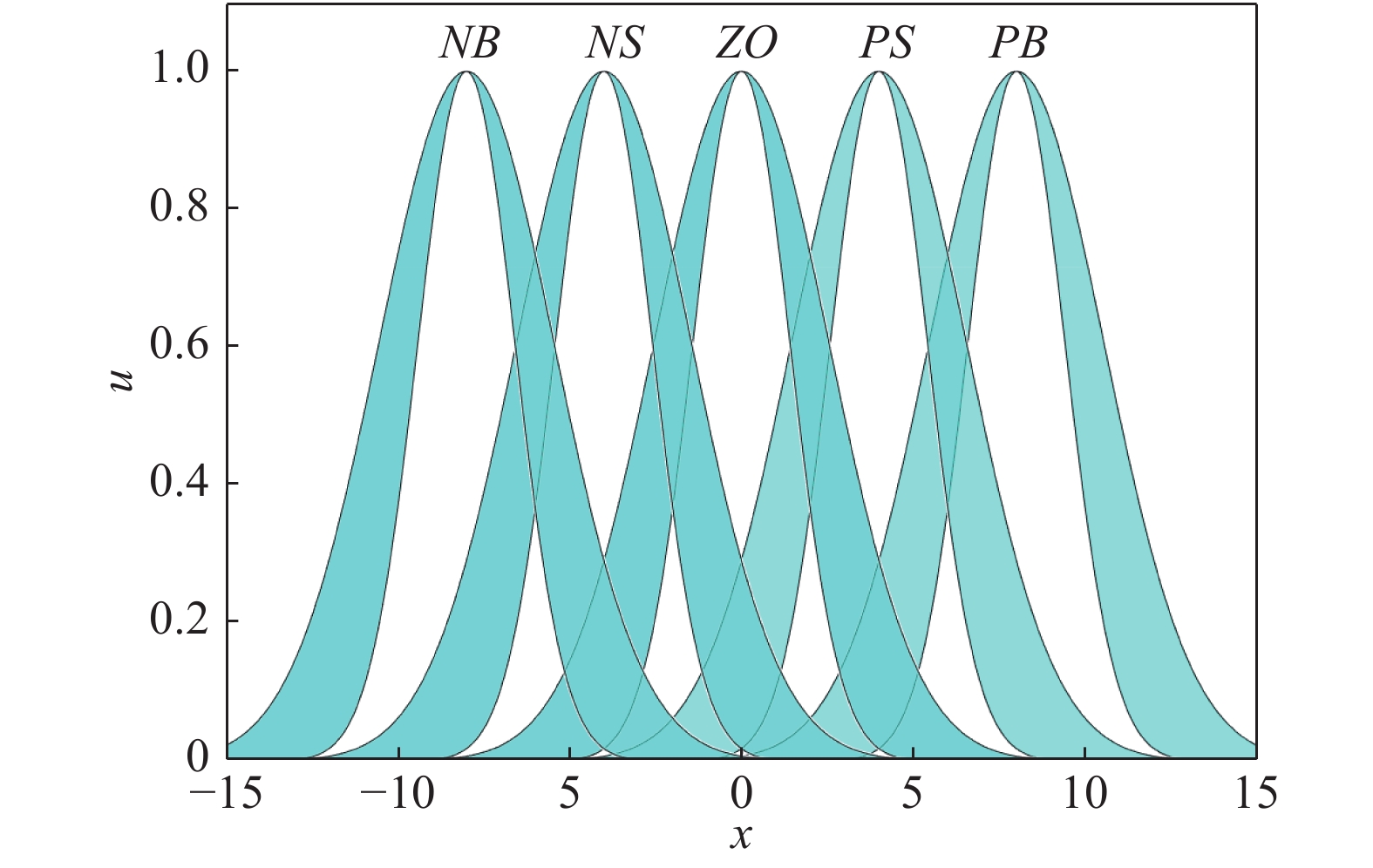
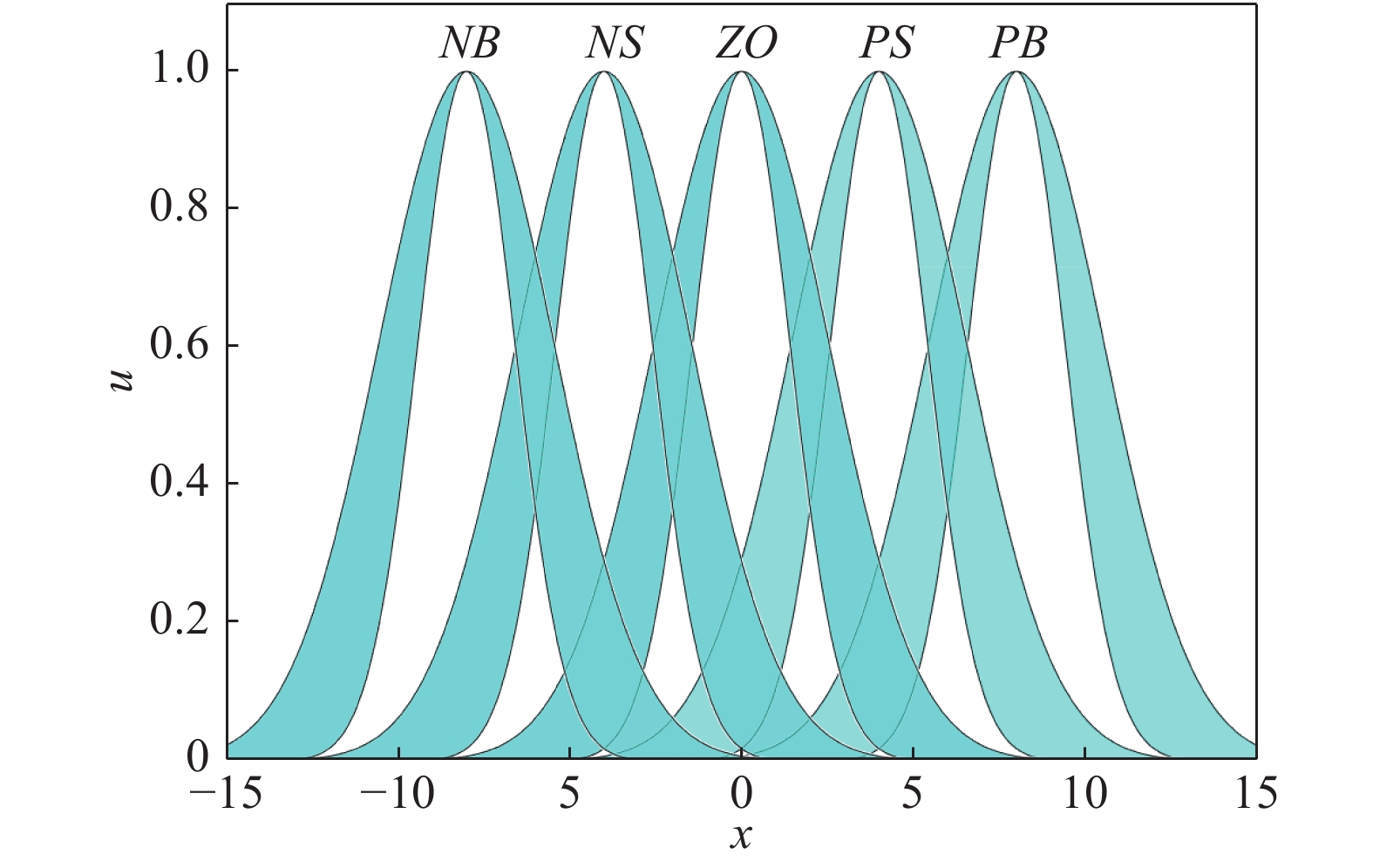
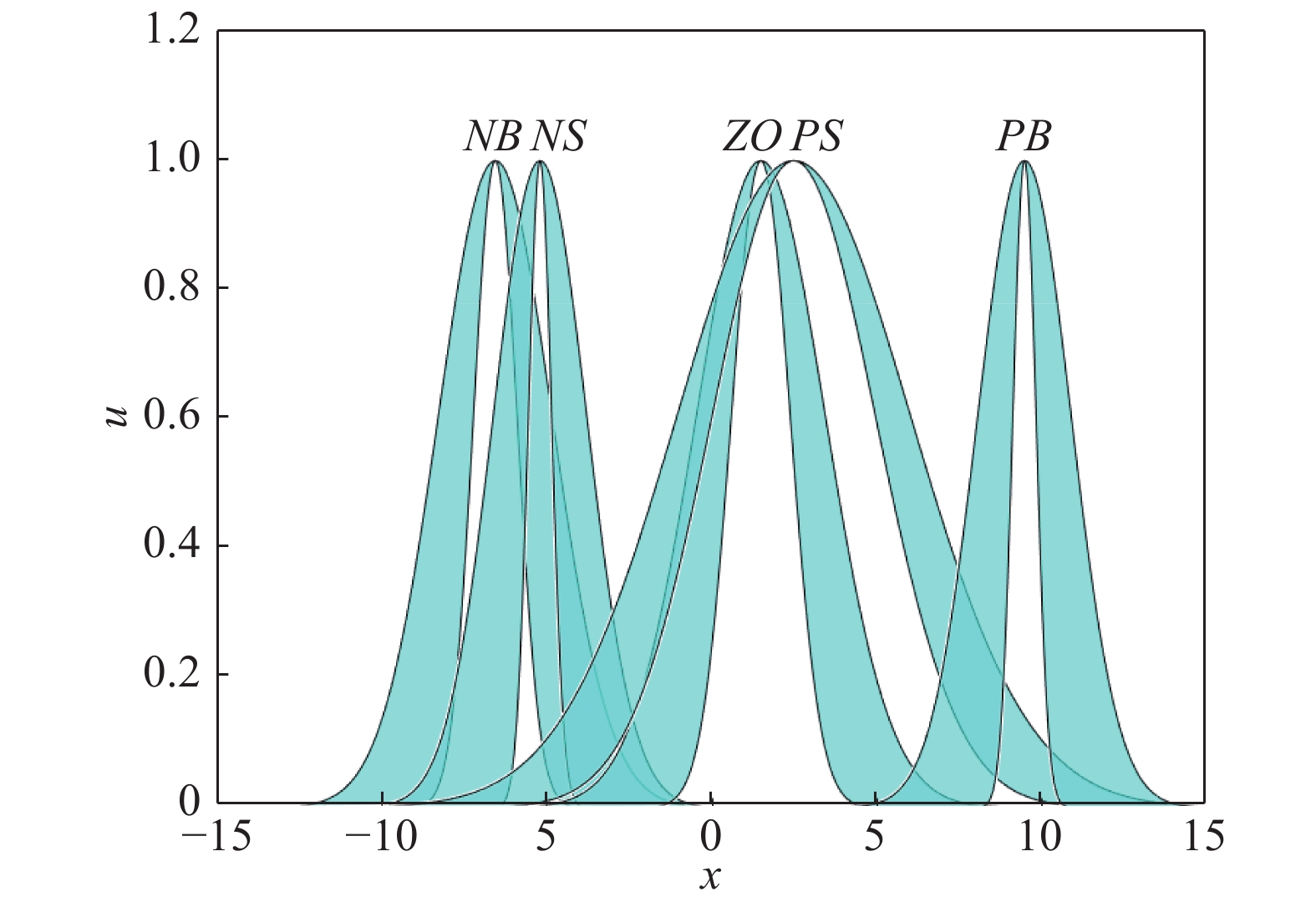
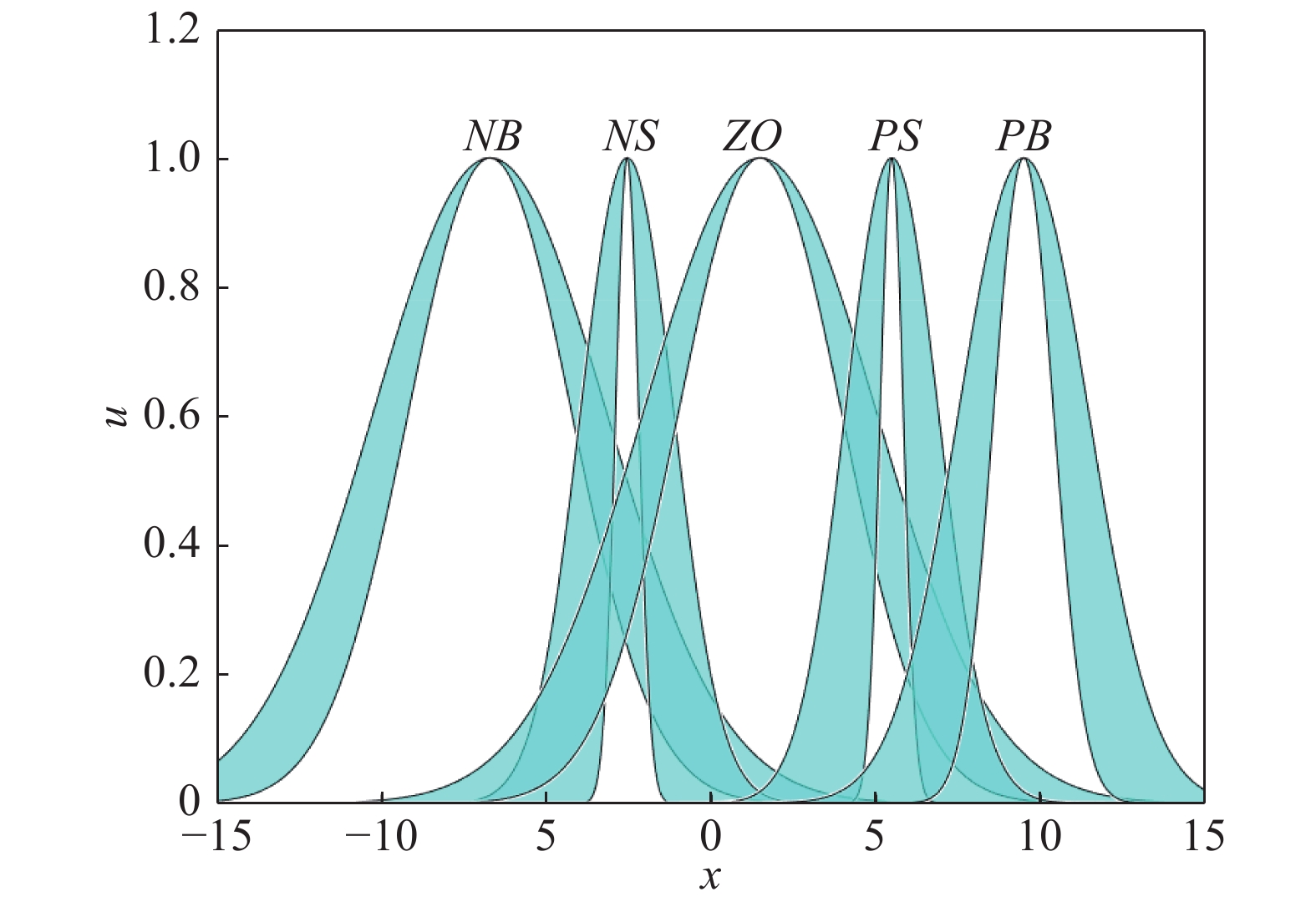
在本文中, 我们用5个GT2FS来对输入的模糊论域进行分割, 分别为负大集
| (36) |
| (37) |
其中,
| (38) |
| (39) |
其中,
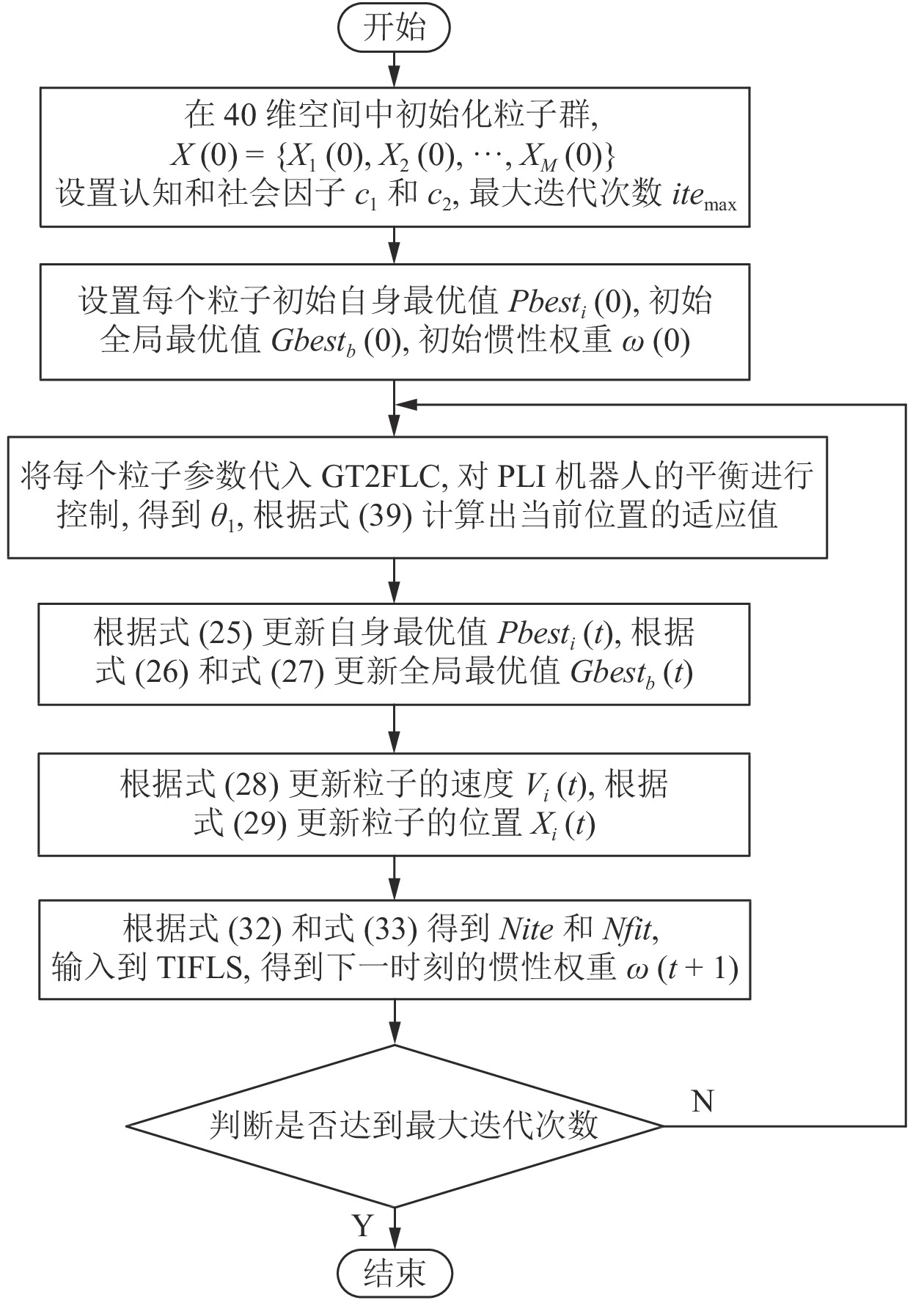
在本文中, 通过FPSO算法对GT2FLC的隶属函数进行优化, 以得到更好的控制性能. GT2FLC的两个输入分别对应5 个GT2FS, 而每个GT2FS的隶属函数需要用
| (40) |
图7为整个FPSO的算法流程图. 最大迭代次数
本节针对PLIR平衡调节的非线性模型, 运用本文所设计的GT2FLC进行平衡控制, 并且通过FPSO算法对GT2FLC 中隶属函数参数进行优化. 同时, 本文还考虑了外部扰动对控制效果的影响. 此外, 为了验证本文方法的优越性, 设计了T1FLC和IT2FLC控制PLI机器人的平衡来与GT2FLC作对比. 最后将标准PSO算法与FPSO算法进行了对比. 图8和图9为GT2FLC两个输入优化前的隶属函数的FOU, 次隶属函数参数
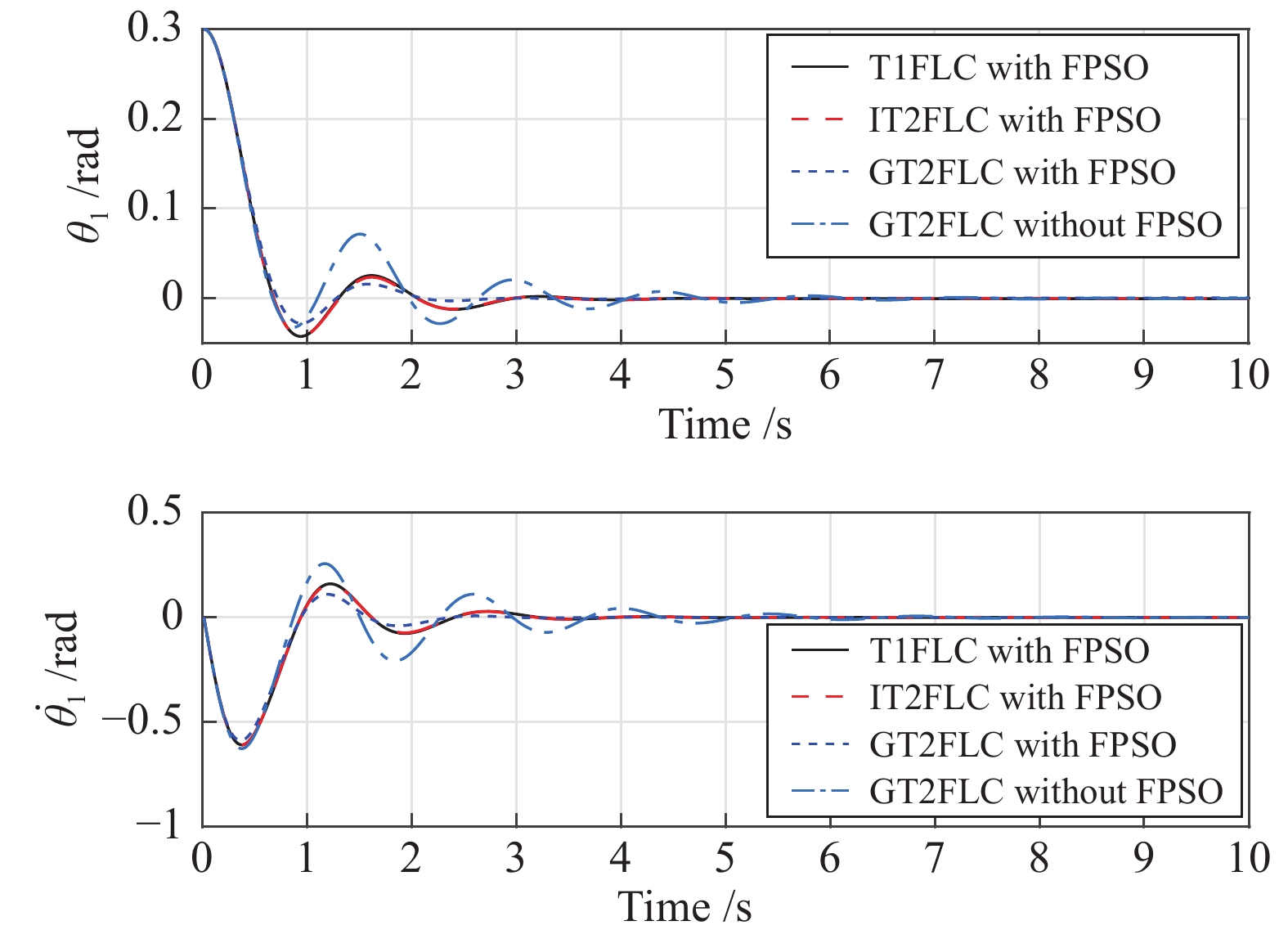
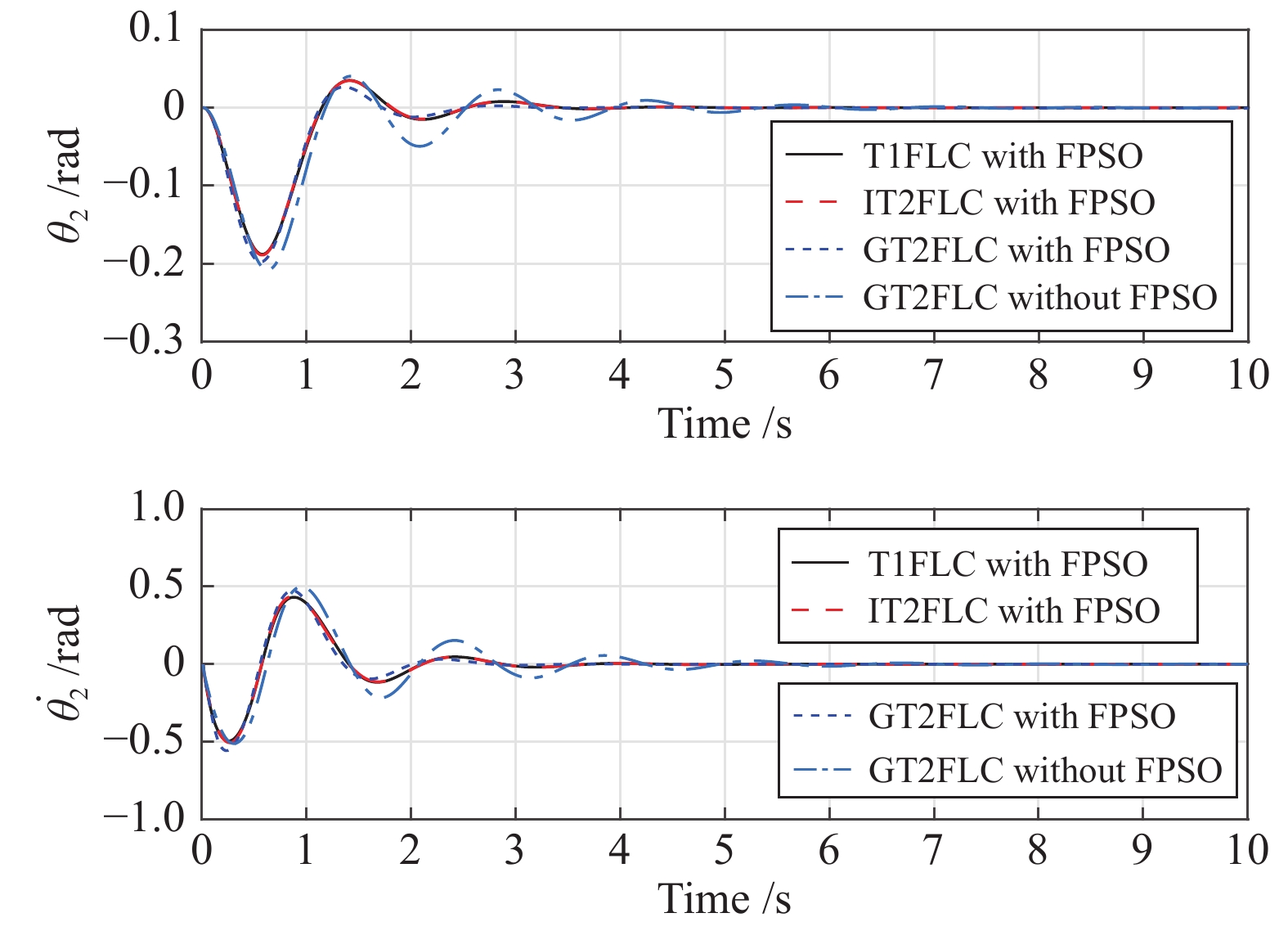
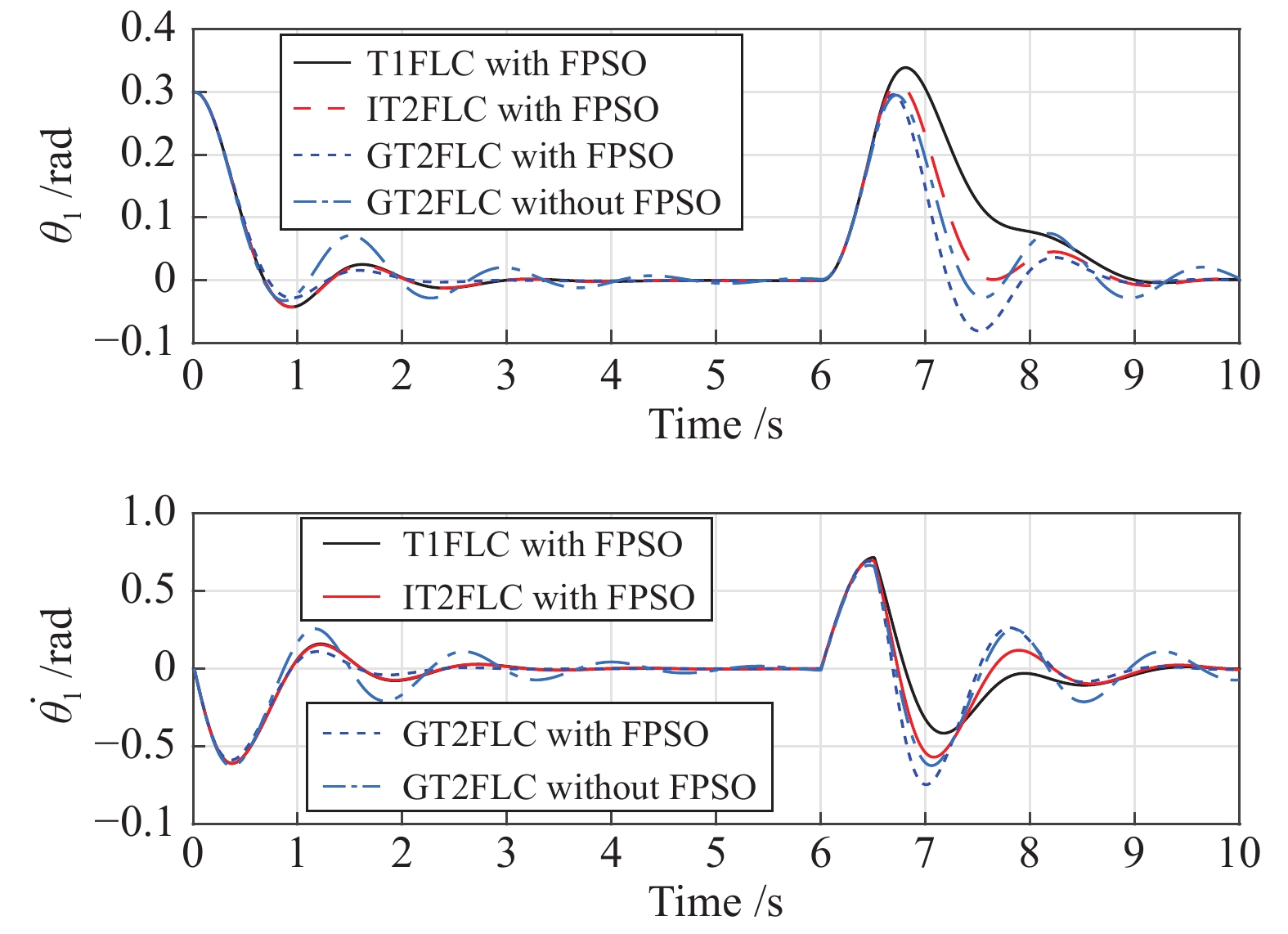
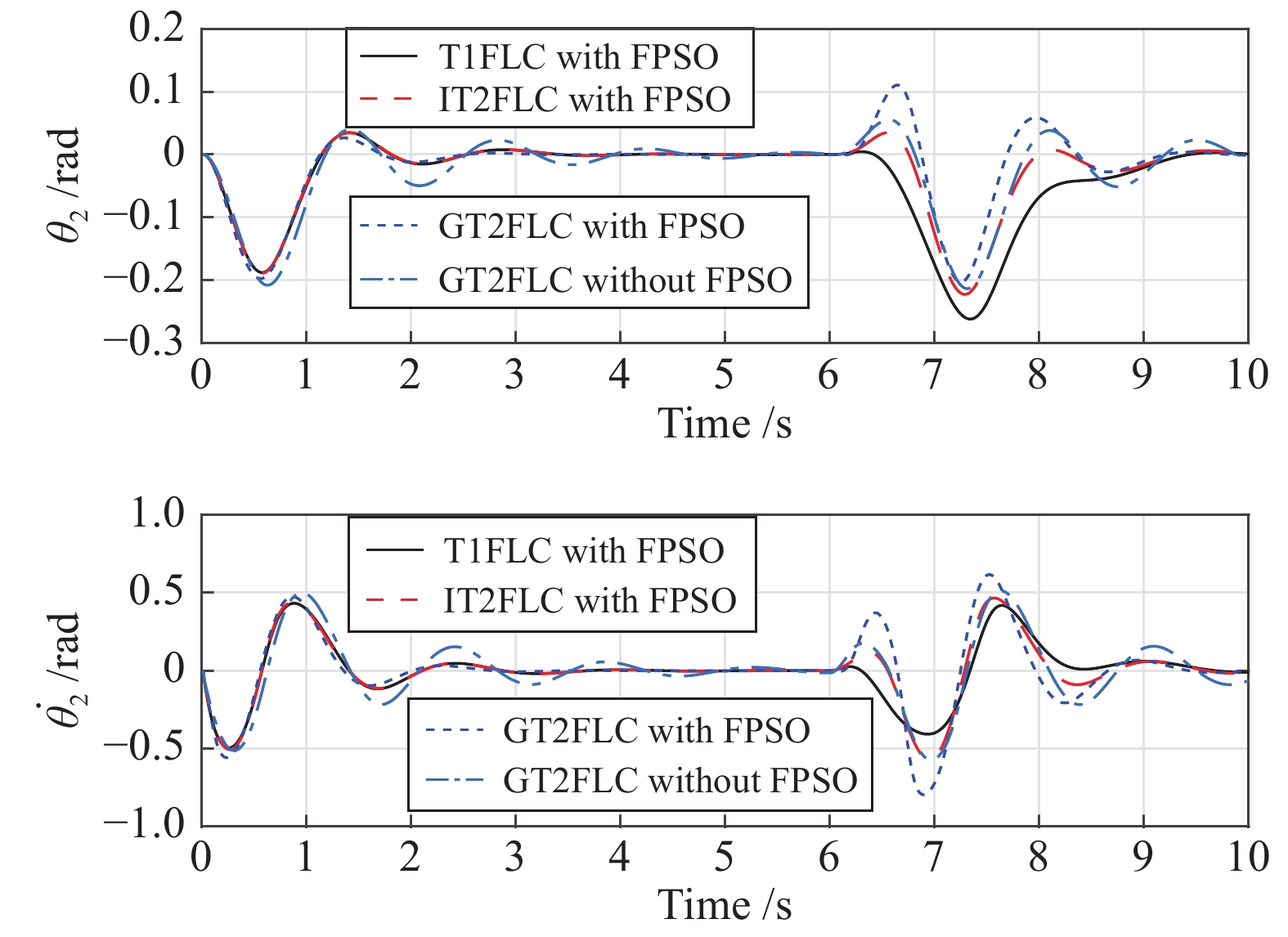
首先考虑在没有任何外部干扰的情况下, 对比在FPSO优化下的GT2FLC与没有优化的GT2FLC的平衡控制效果, 此外, 还与FPSO优化下的IT2FLC和T1FLC平衡控制效果进行了对比. 初始状态
接下来考虑在有干扰情况下, 将几种控制器的控制效果作对比. 当PLIR机器人达到平衡时, 遇到一个外部干扰
为了验真FPSO算法的优越性, 我们用标准PSO算法和FPSO算法分别对几种控制器进行30 次优化. 将两种优化算法优化后的控制器分别对两种情况下的PLIR机器人进行平衡控制, 因为
| (41) |
评价指标越小表明控制器具有越好的性能. 表4为几种控制器在无干扰情况下的评价指标的均值, 表5 为几种控制器在有外部干扰情况下的评价指标的均值. 可以看出, 在相同控制器之间进行对比, FPSO优化后的评价指标要比标准PSO优化的评价指标更小.
本文针对PLIR平衡调节问题, 设计了一个GT2FLC, 并且通过FPSO算法优化了GT2FLC中的隶属函数参数. 仿真结果表明, GT2FLC经过FPSO算法的优化, 使PLIR更快地到达稳定位置, 并且具有更小的超调. 通过与IT2FLC 和T1FLC的对比表明, 本文所设计的GT2FLC有更好的控制效果. 在标准PSO与FPSO 的对比中, 可以看出经过改进后的FSO具有更好寻优能力. 在GT2FLC中, 隶属函数对控制性能具有很大的影响, GT2FS 三维结构的隶属函数相比于IT2FS与T1FS有更多的自由度, 使得GT2FLC具有比T1FLC和IT2FLC更大潜力. 在未来的工作中, 主要是通过三维仿真平台对本文的算法进行仿真, 以验证本文所提算法的有效性。