 0373-5939925
0373-5939925 2851259250@qq.com
2851259250@qq.com

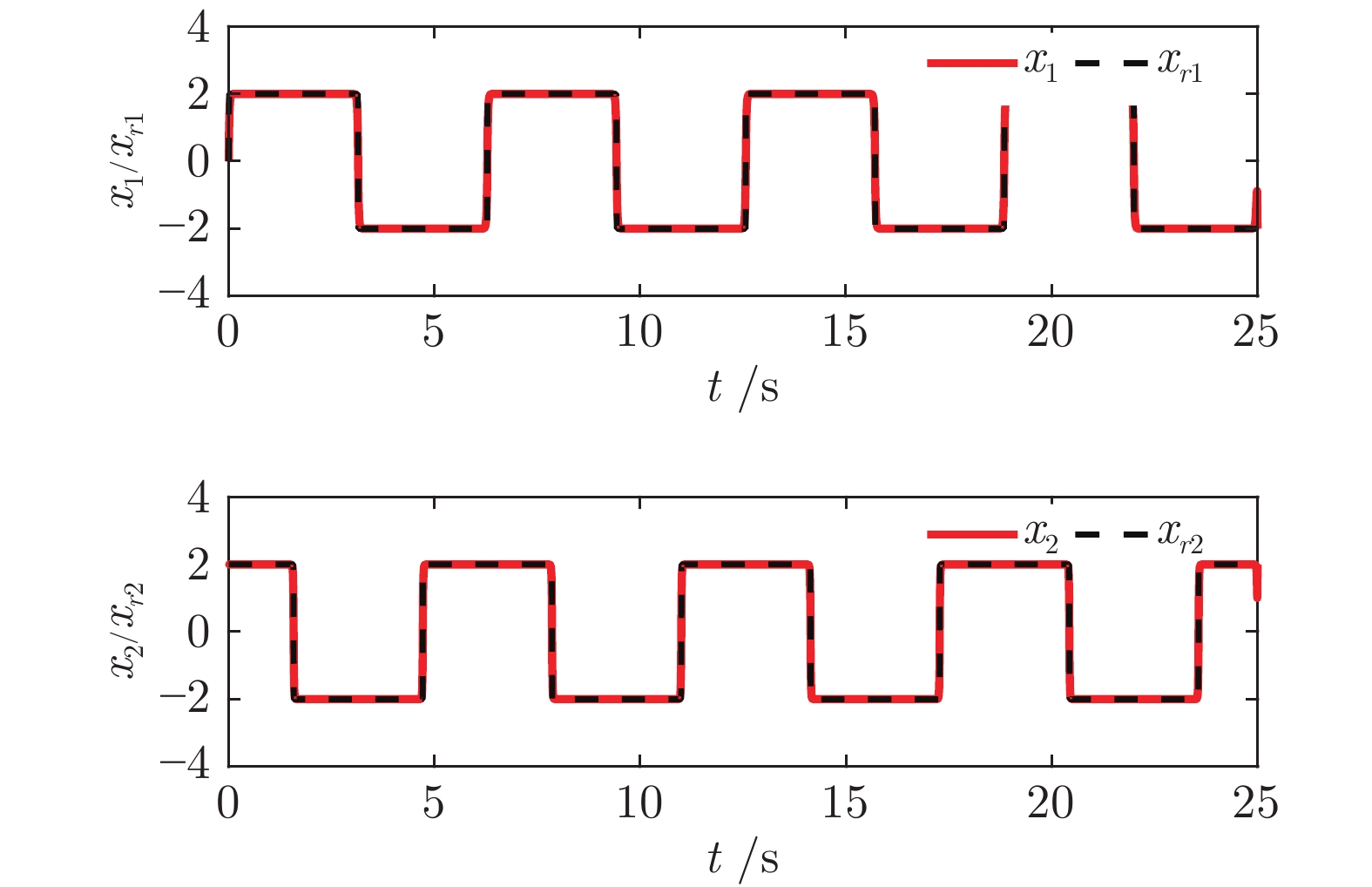
图 1 本文所提方法系统状态输出
Fig. 1 Output curves by using the method proposed in this paper
跟踪和镇定是控制领域的两个典型问题. 一般来说, 相较于镇定问题, 跟踪更为困难. 这是因为镇定只需要在系统的状态或输出受到干扰而偏离原平衡状态时, 施加控制作用, 使得系统状态或输出恢复到原平衡状态即可, 而跟踪控制问题要求系统的状态或输出能够跟随任意参考输入. 跟踪控制不仅是控制理论研究的热点问题, 在工程领域也具有很强的应用背景, 比如机器人运动轨迹跟踪控制[1]、船舶轨迹跟踪控制[2]和飞行器姿态控制[3]等.
跟踪控制器的设计方法主要分为两类, 一类是追求跟踪误差渐近收敛的常规跟踪控制方法, 另一类是兼顾跟踪误差和整体性能的最优跟踪控制方法. 常规跟踪控制方法通过反馈实现调节, 利用前馈使得系统状态跟踪参考输入. 由于该方法基于零极点对消原理, 如果系统存在不可对消的不稳定零点, 会导致闭环系统输出产生相移和增益误差[4]. 为解决该问题, 文献[4-5]提出了一种多速率前馈跟踪控制方法, 使得存在不稳定零点的线性系统能够完全跟踪参考输入. 20世纪90年代初, 随着自适应控制的发展以及模糊逻辑系统和神经网络等智能算法的引入, 具有不确定性和非线性特性的复杂系统的跟踪控制问题受到人们的广泛关注. 文献[6]针对一类具有不确定动态的回滞非线性系统, 提出了一种鲁棒自适应反步跟踪控制方法, 该方法将整个非线性系统划分为多个子系统, 对每个子系统进行设计, 直到倒推至系统输入. 随着系统阶数的增加, 该方法的推导过程会变得非常复杂, 容易产生复杂度爆炸问题. 文献[7]针对一类模型未知的严反馈的单输入单输出非线性系统, 通过引入动态表面控制技术和最小学习参数方法来解决传统反步法带来的复杂度爆炸的问题, 提出了一种鲁棒自适应跟踪控制方法, 使得系统能够跟踪任意参考输入. 文献[8]针对一类含有外部干扰和建模不确定性的非线性多输入多输出系统, 将模糊控制方法与反步法相结合, 设计鲁棒自适应模糊控制器, 保证系统输出信号一致有界并能收敛到参考输入附近. 文献[9]提出一种基于输出跟踪误差的自适应模糊控制方法, 设计带有模糊观测器的模糊控制器, 来减小未知非线性系统的跟踪误差.
上述常规跟踪控制方法的目标是找到一个稳定的控制器, 使得系统状态或输出跟踪参考轨迹. 在控制器设计中, 常常要兼顾到系统的跟踪误差和整体性能. 最优跟踪控制方法可以通过最小化二次型性能指标, 一方面使系统跟踪误差渐近收敛, 另一方面使系统获得最优性能. 文献[10]指出线性二次型最优跟踪(Linear quadratic tracking, LQT)控制器由反馈项和前馈项两部分组成, 其中反馈项使闭环系统稳定, 前馈项使闭环系统输出跟踪参考输入. 文献[11]针对连续时间线性多变量系统, 将开环解耦控制与LQT 相结合, 提出了一种近似最优跟踪控制方法, 实现了多变量系统的解耦和跟踪控制. 设计线性最优跟踪控制器的关键在于求解代数黎卡提方程, 由于该方程中包含着系统模型参数信息, 所以对于这种传统的最优跟踪控制方法, 当系统模型参数未知时, 就无法得到有效应用. 为解决这一问题, 文献[12]针对模型参数部分未知的连续时间线性系统, 提出了一种基于策略迭代的自适应动态规划方法, 通过计算代数黎卡提方程的数值解, 进而得到近似最优跟踪控制律. 不过这类方法大多要求系统状态完全已知, 为了解决这个问题, 文献[13] 针对模型参数部分未知的离散时间线性系统, 仅使用系统输入输出数据, 提出了一种基于值迭代和策略迭代的自适应动态规划方法, 设计近似最优跟踪控制器, 使得系统输出能够跟踪参考输入. 与线性最优跟踪控制器设计方法类似, 设计非线性最优跟踪控制器时需要求解非线性哈密顿−雅可比−贝尔曼方程. 许多专家学者针对这一问题也展开了深入研究. 文献[14]针对模型参数部分未知的连续时间非线性系统, 提出了一种基于多层神经网络的近似最优跟踪控制器设计方法, 先使用神经网络辨识系统模型, 再分别设计反馈神经控制器和前馈神经控制器, 使得系统可以较好的跟踪参考输入, 不过该方法使系统输出和控制输入在初始时刻会产生较大的震荡. 为了抑制这种震荡, 文献[15-16]设计了一种新型性能指标, 并提出了一种启发式动态规划方法, 不仅减小了系统输出和控制输入的波动, 还获得了更好的跟踪性能. 文献[17-19]针对模型参数未知的连续时间非线性系统, 提出了一种数据驱动的自适应动态规划方法, 先利用递归神经网络建立数据驱动模型, 在该模型的基础上设计了基于自适应动态规划的近似最优跟踪控制器, 使得系统状态输出能够渐近跟踪期望轨迹. 毫无疑问, 上述研究工作推动了最优跟踪控制方法的进一步发展与应用, 丰富了跟踪控制的研究内容.
实际系统往往具有多变量和强耦合特性, 上述跟踪控制方法没有考虑到多变量系统中可能存在的强耦合特性, 无法保证系统的整体性能最优. 本文针对一类具有强耦合特性的离散时间线性多变量系统, 提出了一种具有解耦性能的最优跟踪控制方法. 首先将耦合项看作可测干扰, 基于零和博弈思想设计一个由系统跟踪误差、控制输入和耦合干扰补偿构成的性能指标; 然后通过最小化这个新的性能指标, 得到最优跟踪控制律, 并给出了加权矩阵的选择方法, 证明了通过该加权矩阵的选择, 一方面可以动态解耦闭环系统并使其稳定, 另一方面可使闭环系统的状态完全跟踪参考输入; 最后进行了仿真对比实验, 实验结果表明与传统的LQT控制器相比, 该方法无论在跟踪误差还是在系统的整体性能方面都具有一定的优越性.
考虑如下离散时间线性多变量系统:
| (1) |
式中,
传统的LQT控制问题是寻找最优跟踪控制律
| (2) |
式中,
| (3) |
式中,
| (4) |
| (5) |
将式(3)代入式(1), 得到闭环系统方程:
| (6) |
由式(4) ~ (6)可以看出, 即使加权矩阵
本文的目的是提出一种具有解耦性能的最优跟踪控制方法, 针对已知的离散时间线性多变量系统(1), 通过预先给定合适的对角半正定矩阵
为了实现解耦控制, 首先令
| (7) |
受到二人零和博弈问题的启发, 将式(7)中的耦合干扰
| (8) |
式中,
定理1. 考虑由式(1)以及参考轨迹
| (9) |
式中,
| (10) |
| (11) |
证明. 根据最小值原理, 定义如下哈密顿函数:
| (12) |
式中,
| (13) |
令
| (14) |
由于二阶偏导数
根据式(12), 得到状态方程和协态方程分别为:
| (15) |
| (16) |
与文献[14]类似, 假设:
| (17) |
将式(17)代入式(14), 可得:
| (18) |
由式(18)可知,
| (19) |
对式(19)进行移项整理后即得到式(9).
将式(1)、式 (14)和式(17)同时代入式(16), 得到:
| (20) |
利用待定系数法, 对比式(20)与式(17), 得到式(10) ~ (11)反向迭代方程.
在初始状态
| (21) |
将式(21)与式(17)进行对比, 可得式(10) ~ (11)中的边界条件. □
推论1. 对任意对角正定矩阵
| (22) |
| (23) |
则对任意的对角正定矩阵
| (24) |
式中, 矩阵
| (25) |
向量
| (26) |
加权矩阵
| (27) |
不仅能够实现闭环系统的解耦, 而且使跟踪误差渐近收敛到零.
证明. 观察式(10), 为了实现解耦控制, 首先令:
| (28) |
| (29) |
根据式(28)和式(29), 可得到式(22)和式(23). 将式(22) ~ (23)代入式(10), 得到:
| (30) |
令式(30)等号右边后3项之和等于任意的对角正定矩阵
| (31) |
由于
将式(24)代入式(1)中, 得到闭环系统方程:
| (32) |
由于矩阵
将选择对角半正定矩阵
将式(26)进行
| (33) |
将式(33)代入式(32)后, 再进行
| (34) |
由极值条件可知, 对于阶跃的参考输入, 稳态时
| (35) |
进一步化简整理得到式(27). 由式(27)易知, 加权矩阵
由于式(27)中涉及到的矩阵
下面针对2种情况进行讨论:
1) 当
| (36) |
由于
2) 当
| (37) |
式中,
a)
b)
综上所述, 对于任意的正定对角矩阵
注1. 当系统本身是解耦的(或耦合性较弱)时, 可以选择矩阵
注2. 本文方法中, 矩阵
注3. 当矩阵
当矩阵
| (38) |
此时, 该系统与式(1)具有相同的形式, 采用本文所提方法, 即可实现输入到输出之间的解耦.
注4. 本文所研究的对象是确定的, 当系统参数存在匹配和不匹配不确定性时, 一方面可以借鉴补偿控制的思想, 将参数不确定性造成的影响视为一种干扰, 通过干扰观测器, 神经网络或者模糊推理系统等对其进行观测或估计, 并在控制器中加入补偿项予以消除, 详见附录A; 另一方面可以借鉴保性能控制的思想, 设计具有解耦性能的保性能跟踪控制器.
算法1. 具有解耦性能的最优跟踪控制算法
步骤1. 选择加权矩阵
步骤2. 根据式(25)计算得到
步骤3. 根据式(26)计算
步骤4. 将
为了验证本文方法的有效性和优越性, 本节分别采用本文方法和传统LQT方法进行对比仿真实验, 并对仿真结果进行了比较和分析. 在仿真过程中, 采用相同的评估函数来比较2种方法的最优性能,
考虑如下两输入−两状态的离散时间线性系统:
| (39) |
式中,
易知该系统的相对增益矩阵为:
根据Bristol-Shinskey衡量指标, 可以判断出该系统是一个强耦合系统.
本实验的目的是针对离散时间线性系统(39), 设计最优跟踪控制器, 使得最大跟踪误差不超过参考输入幅值的10%, 其中参考输入信号为
为了实现控制目标, 首先选择加权矩阵:
将上述加权矩阵代入式(25)和式(27), 得到各时刻
为了验证本文所提方法的优越性, 采用传统LQT方法, 选择两组参数对式(39)进行仿真实验. 令加权矩阵:
当加权矩阵
当加权矩阵
为了比较2种不同控制策略的最优性能, 定义如下评估函数:
| (40) |
式中,
当采用第1组参数下的传统LQT方法时, 得到如图7所示的最优性能曲线. 从图7可以看出, 本文所提方法的最优性能明显小于传统LQT方法的最优性能. 由图1 ~ 4 可以看出, 对于传统LQT方法即使付出了更大的控制输入, 当某一参考输入发生变化时, 其他回路状态还是会受到较大的影响, 系统达到稳态时也不能实现完全跟踪; 本文所提方法通过选择合适的加权矩阵, 在较小的控制输入下, 不仅消除了系统不同控制回路之间的耦合作用, 还使得系统状态在稳态时总能完全跟踪参考输入, 故具有解耦性能的最优跟踪方法会得到更小的最优性能.
当采用第2组参数下的传统LQT方法时, 得到如图8所示的最优性能曲线. 从图8可以看出, 本文方法的最优性能仍然小于传统LQT方法的最优性能. 由 图1和图5可以看出, 虽然两种控制策略的跟踪效果相同, 但由图2和图6可知, 此时传统LQT方法需要更大的控制输入, 导致最优性能变得更大.
针对一类具有强耦合特性的离散时间线性多变量系统, 本文提出了一种具有解耦性能的最优跟踪控制方法. 该方法受到二人零和博弈思想的启发, 设计了新的性能指标, 并根据极小值原理最小化该性能指标, 得到最优跟踪控制律. 按照本文给出的加权矩阵选择办法, 消除了不同控制回路之间的耦合影响, 使得系统的状态输出可以跟踪任意期望轨迹. 仿真实验表明, 当离散时间线性多变量系统具有强耦合特性时, 该方法可以获得更小的控制输入和更小的最优性能, 并且系统达到稳态时, 系统输出总能完全跟踪参考输入. 在接下来的研究中, 将进一步考虑系统模型部分未知的情况, 将自适应动态规划算法与本文解耦控制方法相结合, 设计近似最优跟踪控制器, 进而实现具有模型不确定性和强耦合特性的线性多变量系统的最优跟踪控制.
考虑如下具有匹配和不匹配参数不确定性的离散时间非线性系统[20]
| (A1) |
式中, 向量
首先, 根据式(A1)的线性标称系统(1)得到具有解耦性能的无干扰最优跟踪控制器, 即式(24), 并假设该控制器能保证与式(A1)组成的闭环系统的输入和状态信号有界. 令:
| (A2) |
| (A3) |
则式(24)简化为:
| (A4) |
其次, 将式(A1)中匹配不确定性项和不匹配不确定性项统一看做线性标称系统的不确定性项, 即令:
| (A5) |
则式(A1)简化为:
| (A6) |
最后, 设计如下基于神经网络补偿的最优跟踪控制器:
| (A7) |
式中,
为验证所提控制器(A7)的有效性, 本文进行了仿真实验. 考虑如下存在匹配和不匹配参数不确定性的离散时间非线性系统:
| (A8) |
式中, 向量
首先, 根据式(A2)和式(A3)计算










