 0373-5939925
0373-5939925 2851259250@qq.com
2851259250@qq.com

化工过程多回路PID控制系统模式切换参数自整定
引言
化工过程一般为多变量系统,即存在着多个被控变量和多个操纵变量。随着各种化工过程先进工艺的快速发展,越来越多的生产过程被构造成多变量控制系统[1]。与单变量系统相比,多变量系统输入变量和输出变量之间一般存在一定程度的耦合,这就为多变量系统的控制器设计带来了不小的困难。对于多变量系统,设计一个包含所有被控变量和操纵变量的集中控制系统是最为理想的,但是这样的控制设计方案复杂,难以实现,不易维护,可靠性差。因此,考虑到底层控制系统安全可靠的要求,工业现场的底层控制系统仍然主要采用常规分散PID控制[2-3],即将多变量系统分解为多个单变量子系统,分别设计PID控制回路,组成分散的多回路PID控制系统。分散多回路PID控制因其结构简单、设计和整定的简便性以及良好的鲁棒性等优点,从而在工业过程控制领域占有较大的比重。
在进行多回路PID控制系统设计时,首先确定操纵变量和被控变量的控制回路配对,然后将各PID控制回路视为单变量系统,整定PID控制参数,多回路PID控制系统设计应考虑多变量系统的操纵变量和被控变量之间存在的相互耦合作用[4],控制系统设计应使控制回路间的耦合作用尽可能小。Bristol[5]提出了相对增益阵(relative gain array, RGA),Wang等[6]将其推广到高维系统。在RGA中应当尽可能选择大于零且接近于1的元素对应的输入输出配对,即可保证控制回路之间的耦合最小化。为保证闭环控制系统稳定性,Niederlinski[7]提出了尼德林斯基指数(Niederlinski index, NI),与RGA配合使用,筛选不合适的控制回路配对。由于RGA只是利用系统的稳态信息,忽略了系统的动态特性,因此在其基础上提出了各种基于动态信息的改进方法。RGA的动态改进方法大体可以分为:基于开环阶跃响应的时域RGA[8-9]、基于频率特性的频域RGA[10-11]、基于最优闭环控制器的动态RGA[12-13]、稳态信息与动态信息结合的组合RGA[14-17]。虽然RGA及其改进方法在一定程度上解决了常规控制系统结构设计问题,但是控制系统性能还与控制器参数有关。由于系统内部耦合作用的存在,其他回路的控制器参数必定对本回路的等效被控对象产生影响[18]。在实际工业现场,由于种种工艺需求,操作人员往往需要对控制回路进行手动/自动切换。当其他回路开环/闭环切换时,本回路的等效被控对象必然发生变化,本回路的PID控制器参数应当进行相应的调整以适应本回路被控对象动态特性的变化,才能保证稳定性并维持一定的控制性能。
本文将利用现代频域法,从多变量系统对角优势下正Nyquist稳定性判据的角度考虑,进行控制回路模式切换时的控制器参数校正工作。目前现代频域法的控制系统设计从单变量系统推广到了多变量系统[19-20]。Nyquist阵列设计法是现代多变量频域设计法中最成熟的一种方法。Rosenbrock等[21-23]论述了Nyquist阵列设计法的基本思想,为后续研究提供了基本研究方法。在此基础上,McMorran[24-25]提出了逆Nyquist阵列设计的扩展方法。Ho等[26]和Chen等[27]提出了正Nyquist阵列设计方法。Nyquist阵列设计法往往与Gershgorin带结合使用,Gershgorin带可以同时判断控制系统的对角优势和闭环稳定性,Chen等[28]利用Gershgorin带定理对多变量系统完成了PID控制器参数设计。
常规PID控制的整定算法一般只是针对单变量系统。Luyben[29]提出了著名的BLT方法,即利用Z-N规则来调整PID参数,Ho等[30]提出了基于增益和相角裕量的设计方法。多变量分散PID控制中控制回路模式切换时控制器参数的校正问题尚无研究。
本文基于对角优势下正Nyquist稳定判据,从Gershgorin圆边界点的角度分析系统的稳定性,根据闭环稳定性进一步确定控制器增益的调整方向及程度,以保证控制回路在切换前后的闭环稳定性。
1 控制回路模式切换问题
对于一个存在内部耦合的多变量化工过程,考虑到化工过程多回路PID控制系统模式切换时对实时性和实际工业现场操作人员对可操作性的要求,本文采用了工业过程控制中常用的一阶惯性纯滞后的传递函数矩阵 G (s)形式,如
其中
式中,s为复变量。
工业现场经验丰富的工艺人员很容易获取这种一阶惯性纯滞后模型,他们一般都能知晓各输入变量对各输出变量的静态增益k,以及当输入变量发生变化后输出变量多长时间才能变化和多长时间到达稳定状态,分别对应纯滞后时间τ和动态响应时间ts,由此可以计算得到时间常数T(动态响应时间ts减掉纯滞后时间τ后再除以3或4)。
对于由
集中控制采用单个控制器,变量之间仅一种配对方式,其控制效果较好,但直接设计集中控制器的难度较大。一般设计单个解耦器和多个控制器作为集中控制器[31],变量之间采用对角配对方式,控制效果与解耦效果相关,其控制结构如图1所示。
图1
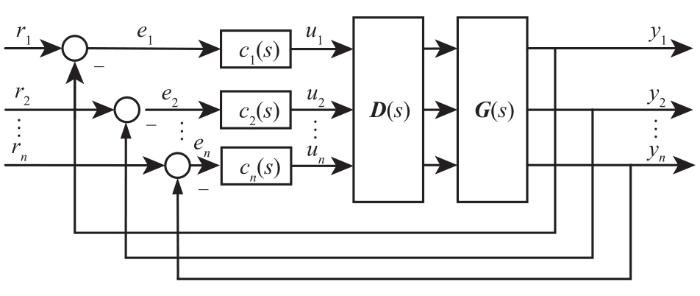
图1 多变量解耦控制
Fig.1 Multivariable decoupling control
分散控制采用多个单变量控制器,变量配对方式有多种,控制效果稍差,但其结构简单、设计难度小、易于维护以及具有良好的鲁棒性能等,因此应用比较广泛[32-33],其控制结构如图2所示。
图2

图2 多变量分散控制
Fig.2 Multivariate decentralized control
本文所研究的控制系统为分散PID控制系统。下面以双输入双输出的
假设
当仅第一个控制回路投入自动模式,如图3所示,此时u2不发生变化,此时
图3

图3 仅第一个控制回路闭合时系统结构
Fig.3 Block diagram of the system structure when only the first control loop is closed
u1对y1控制回路的等效被控对象的传递函数为g11(s)。
当第二个控制回路也投入自动模式(图4),由于系统内部的耦合作用,输入u1除了通过g11(s)影响输出y1,还通过g21(s)影响输出y2,输出y2通过闭环的第二个控制回路影响输入u2,输入u2通过g12(s)影响输出y1,此时
图4

图4 第二个控制回路闭合时系统结构
Fig.4 Block diagram of system structure when the second control loop is closed
u1对y1控制回路的等效被控对象的传递函数中除了第二个控制回路开环时的等效传递函数g11(s),还包含了输入u1、u2和输出y1、y2之间的相互耦合影响g12(s)、g21(s),第二个控制回路的开环被控对象g22(s)和控制器c2(s)。y1和u1之间的开环传递函数可用虚线框中部分来表示。因此,由于系统内部耦合的影响,当其他回路进行手动/自动模式切换时,本回路的等效被控对象会发生较大的变化,原有的控制器参数如果不进行及时的调整,控制性能会下降,甚至会造成整个系统的不稳定。随着系统规模的增大,其耦合程度也将加剧,每增加一个控制回路,将会对更多已设计完成的控制回路产生影响,已设计好的控制器大概率上无法维持控制回路模式切换后整个控制系统的性能。
2 全局Nyquist稳定判据
对于多变量系统的多回路分散常规控制系统,由于各控制回路之间存在相互影响,控制系统不能仅考虑各个局部的控制回路的稳定性,而应从整个系统的角度研究控制回路模式切换时的稳定性。下面基于对角优势下正Nyquist稳定性判据,从Gershgorin圆边界点出发定量分析各个控制回路在模式切换前后的稳定性变化程度的方法。
2.1 对角优势
若 G (s)在包围右半s平面的初等D形围线上满足以下关系
则称 G (s)具有行对角优势。
若 G (s)在包围右半s平面的初等D形围线上满足以下关系
则称 G (s)具有列对角优势。
G (s)满足行对角优势或列对角优势都称其具有对角优势。
2.2 Gershgorin圆
对于传递函数矩阵 G (s),以其对角元素gii (s)在复平面s上的对应点为圆心,以其第i行的行非对角元素模之和di 为半径作圆,此圆称为第i行Gershgorin圆。以其第i列的列非对角元素模之和d
行Gershgorin圆的表达式为
列Gershgorin圆的表达式为
随着s的变化,这些圆扫出n个带状区域,称为行(或列)Gershgorin带。
2.3 多变量系统正Nyquist稳定判据
多变量控制系统的一般结构如图5所示。
图5

图5 系统的控制结构
Fig.5 System control chart
图中, r、e、y 分别为被控变量给定值、控制偏差和系统输出; G (s)为被控过程传递函数矩阵;对于多回路PID控制器, C (s)为对角矩阵形式的控制器; F 为反馈系数矩阵,为满秩常数对角矩阵。
令 Q (s)为前向通道传递函数矩阵
基于开环对角优势系统 Q (s),结合Gershgorin圆的概念,多变量系统的正Nyquist稳定判据如下。
(1)诸qii (s)的行Gershgorin带或列Gershgorin带不包含对应的临界点
(2)诸qii (s)的行Gershgorin带或列Gershgorin带关于临界点
式中,
如果 Q (s)为开环稳定系统,即 Q (s)的开环特征多项式在右半s平面的零点个数为零,并且反馈系数矩阵 F 为单位阵,则稳定判据(2)改为:诸qii (s)的行Gershgorin带或列Gershgorin带不绕过临界点
上述对角优势下正Nyquist稳定判据中,(1)为对角优势判据,判断 Q (s)是否对角优势;(2)为稳定性判据,判断 Q (s)满足对角优势条件下是否稳定。该判据为一充分性判据。当系统满足上述判据时,一定为稳定系统;当某一系统不满足对角优势时,也可能为一稳定系统。该判据与系统稳定性的逻辑关系可用Venn图表示(图6)。
图6

图6 正Nyquist判据与稳定性之间的Venn图
Fig.6 The Venn diagram between direct Nyquist criterion and system stability
3 控制回路模式切换时控制器参数校正方案
基于对角优势下的正Nyquist稳定性判据,当开环系统稳定时,行Gershgorin带或列Gershgorin带在实轴上的边界点将成为闭环系统是否稳定的关键。根据各控制回路在模式切换前后各Gershgorin带边界点的变化程度,可确定各回路控制器增益的调整方向及程度,进而实现各回路的控制器参数在控制回路模式切换瞬间的自动整定。
3.1 一阶惯性纯滞后多变量系统的Gershgorin圆边界点
如果被控过程传递函数矩阵 G (s)的各元素gij (s)均为一阶惯性纯滞后系统,控制器传递函数对角矩阵 C (s)的各元素ci (s)均为PID控制器,反馈系数矩阵 F 一般为单位阵,即
令s=jω,可以得到其频域表达式为
进一步可以得到前向通道传递函数矩阵的频域表达式为
文献[34-35]指出,模型的开环频率响应不需要在所有的频段都很准确,只需在穿越频率附近或控制器的工作频带范围内足够准确,就可以满足系统设计的要求。下面分析
当
当
当
综上所述,研究
当
行Gershgorin圆边界点表达式
列Gershgorin圆边界点表达式
式中,
根据Gershgorin圆边界点,对角优势下的正Nyquist稳定判据可以转化为:
行对角优势
或列对角优势
3.2 控制器参数校正方法
当控制回路模式切换后,控制系统出现不稳定的情况时,由对角优势下正Nyquist稳定判据可知,其原因为某行(列)Gershgorin圆边界点
图7

图7 校正前后Gershgorin圆情况
Fig.7 The situation of Gershgorin circle before and after correction
对于一个多回路分散PID控制系统,控制器为对角矩阵形式,其前向通道传递函数矩阵如下
由
当控制回路模式切换时,若第i列Gershgorin圆边界点
式中,为确保Gershgorin圆边界点与
综上所述,当控制回路模式切换时,对各控制回路控制器参数校正步骤如下。
(1) 现场工艺人员根据其操作经验给出所有输入变量对所有输出变量的模型参数
(2) 根据被控过程和控制器初始参数,求qii (jω)的穿越频率ωc,进而求校正前诸列Gershgorin圆的边界点h
(3) 比较列Gershgorin圆的边界点h
(4) 根据现场干扰大小及模型精度情况设定裕量系数
(5) 校正后控制器为pi ci (s)。
上述控制器参数校正流程如图8所示。
图8

图8 计算机辅助设计流程图
Fig.8 Computer-aided flowchart
4 实例分析
选取Shell公司的典型重油分馏塔模型为仿真实例[36],如图9所示。该重油分馏塔由一个侧线汽提塔、三个中段循环回流(顶部循环回流、中段循环回流、底部循环回流)和顶部冷回流组成,操纵变量包括顶部抽出流量u1、侧线抽出流量u2和塔底循环回流换热量u3,被控变量包括塔顶馏出物温度y1、侧线汽提塔馏出物温度y2、塔底循环回流抽出温度y3、塔顶温度y4、塔顶循环回流抽出温度y5、侧线抽出温度y6、中段循环回流抽出温度y7。重油分馏塔是一个多变量、强耦合、大时延的被控过程,被公认为典型的比较难控制的对象,也是众多学者用来验证理论研究的仿真实例。
图9

图9 重油分馏塔流程图
Fig.9 Flowchart of heavy oil fractionator
本实例中,操纵变量和被控变量组成3个PID控制回路,分别为:顶部抽出流量u1 (kmol⋅h-1)-塔顶馏出物温度y1 (K),侧线抽出流量u2 (kmol⋅h-1)-侧线汽提塔馏出物温度y2 (K),塔底循环回流换热量u3 (kJ⋅h-1)-塔底循环回流抽出温度y3 (K),现场工艺人员凭借操作经验很容易获取所有输入变量对所有输出变量的一阶惯性纯滞后模型,其传递函数矩阵为
当3个PID控制回路u1-y1、u2-y2、u3-y3分别进行控制时,首先只将本控制回路闭环投自动,其他控制回路开环手动,避免控制回路之间相互耦合的影响,然后通过经验凑试法整定获得本控制回路初始PID参数。控制器初始参数分别为c1=(0.3, 0.01, 0.3),即PID参数分别为:比例系数KP1=0.3,积分系数KI1=0.01,微分系数KD1=0.3,后文控制器参数写法与之相同,c2=(0.5, 0.03, 0.3),c3=(0.05, 0.004, 0.3)。各个控制回路在只对本回路闭环条件下在初始PID参数下是稳定的。
假设系统的被控变量给定值为r1=1,r2=0,r3=2。然后按照u1-y1,u2-y2,u3-y3的顺序将3个PID控制回路依次由手动投入自动。通过仿真发现,如果不对各个PID控制回路的参数进行校正,整个系统将不能稳定;如果通过本文所述方法来校正控制器c1、c2、 c3,可使闭合后的系统依然可以稳定。
(1) 只将控制回路u1-y1闭合,控制器参数初始值设置为c1=(0.3, 0.01, 0.3)。控制系统仿真曲线如图10所示,可以看出,在仅有一个控制回路投入自动时,整个控制系统是闭环稳定的。
图10

图10 控制回路u1-y1闭合时输出曲线
Fig.10 Output curve when control loop u1-y1 is closed
(2) 控制回路u1-y1到达稳定后,在t = 1000 min时将控制回路u2-y2闭合,控制器参数初始值设置为c1=(0.3, 0.01, 0.3), c2=(0.5, 0.03, 0.3)。此时列Gershgorin圆的边界点为h
表1 控制回路u2-y2模式切换时控制器参数及Gershgorin圆边界点校正前后数据
Table 1
| 控制器参数 | 列Gershgorin圆边界点 | ||
|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 |
| c1=(0.3, 0.01, 0.3) | c1=(0.2037, 0.0068, 0.2037) | h | h |
| c2=(0.5, 0.03, 0.3) | c2=(0.5, 0.03, 0.3) | h | h |
图11

图11 控制回路u2-y2切换时校正前后输出曲线
Fig.11 Output curve before and after correction when control loop u2-y2 is closed
(3) 控制回路u1-y1和u2-y2到达稳定后,在t=3000 min时将控制回路u3-y3闭合,控制器参数初始值设置为c1=(0.2037, 0.0068, 0.2037), c2=(0.5, 0.03, 0.3), c3=(0.05, 0.004, 0.3)。此时列Gershgorin圆的边界点为h
图12

图12 控制回路u3-y3切换时校正前后输出曲线
Fig.12 Output curve before and after correction when control loop u3-y3 is closed
表2 控制回路u3-y3模式切换时控制器参数及Gershgorin圆边界点校正前后数据
Table 2
| 控制器参数 | 列Gershgorin圆边界点 | ||
|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 |
| c1=(0.2037, 0.0068, 0.2037) | c1=(0.1234, 0.0041, 0.1234) | h | h |
| c2=(0.5, 0.03, 0.3) | c2=(0.2570, 0.0154, 0.1542) | h | h |
| c3=(0.05, 0.004, 0.3) | c3=(0.05, 0.004, 0.3) | h | h |
从图11和图12可以发现,在现有控制回路已闭环的情况下,将新的控制回路也投入自动,由于控制回路之间的耦合作用,等效被控对象发生变化,原有的控制器参数均不能与之适应,Gershgorin圆边界点将在
5 结论
本文基于对角优势下正Nyquist稳定判据,从整个系统的角度研究控制回路模式切换时的稳定性。通过对一阶惯性纯滞后多变量系统的频域分析,找到Gershgorin圆边界点的位置。根据原有控制器参数下的列Gershgorin圆边界点,确定需要校正的控制器,然后根据Gershgorin圆边界点与稳定性之间的关系确定控制器增益校正系数。最后通过Shell公司重油分馏塔的多回路PID控制系统的实例分析,验证了该方法的可行性和有效性。
在实际工业现场,通过系统辨识获得多变量系统的一阶惯性纯滞后模型较为容易,本文所述方法可辅助现场操作人员完成多变量系统常规PID控制回路的手动/自动切换,可以保证手动/自动模式切换时系统的稳定性。对于被控过程模型不精确和噪声干扰问题,在实际应用时,可适当减小裕量系数,来保证控制回路的稳定性,而当模型参数较为精确时,可适当增大裕量系数以获得较好的控制性能。

- 刚刚!2026年中科院分区,公布!本次看点:中科院分区变更为新锐分区;不再单独发布预警期刊;37种期刊“under review”~
- 这些重要报纸理论版都支持邮箱投稿!回复极快!
- GB/T 7714-2025与GB/T 7714-2015相比,变更了哪些,对期刊参考文献格式有什么影响?
- 别被这个老掉牙的报纸理论版投稿邮箱误导了!最新核实91个报纸理论版投稿邮箱通道,一次集齐
- 喜报!《中国博物馆》入选CSSCI扩展版来源期刊(最新CSSCI南大核心期刊目录2025-2026版)!新入选!
- 2025年中科院分区表已公布!Scientific Reports降至三区
- 国内核心期刊分级情况概览及说明!本篇适用人群:需要发南核、北核、CSCD、科核、AMI、SCD、RCCSE期刊的学者
- CSSCI官方早就公布了最新南核目录,有心的人已经拿到并且投入使用!附南核目录新增期刊!
- 北大核心期刊目录换届,我们应该熟知的10个知识点。
- 注意,最新期刊论文格式标准已发布,论文写作规则发生重大变化!文字版GB/T 7713.2—2022 学术论文编写规则

